Descargar para leer sin conexión

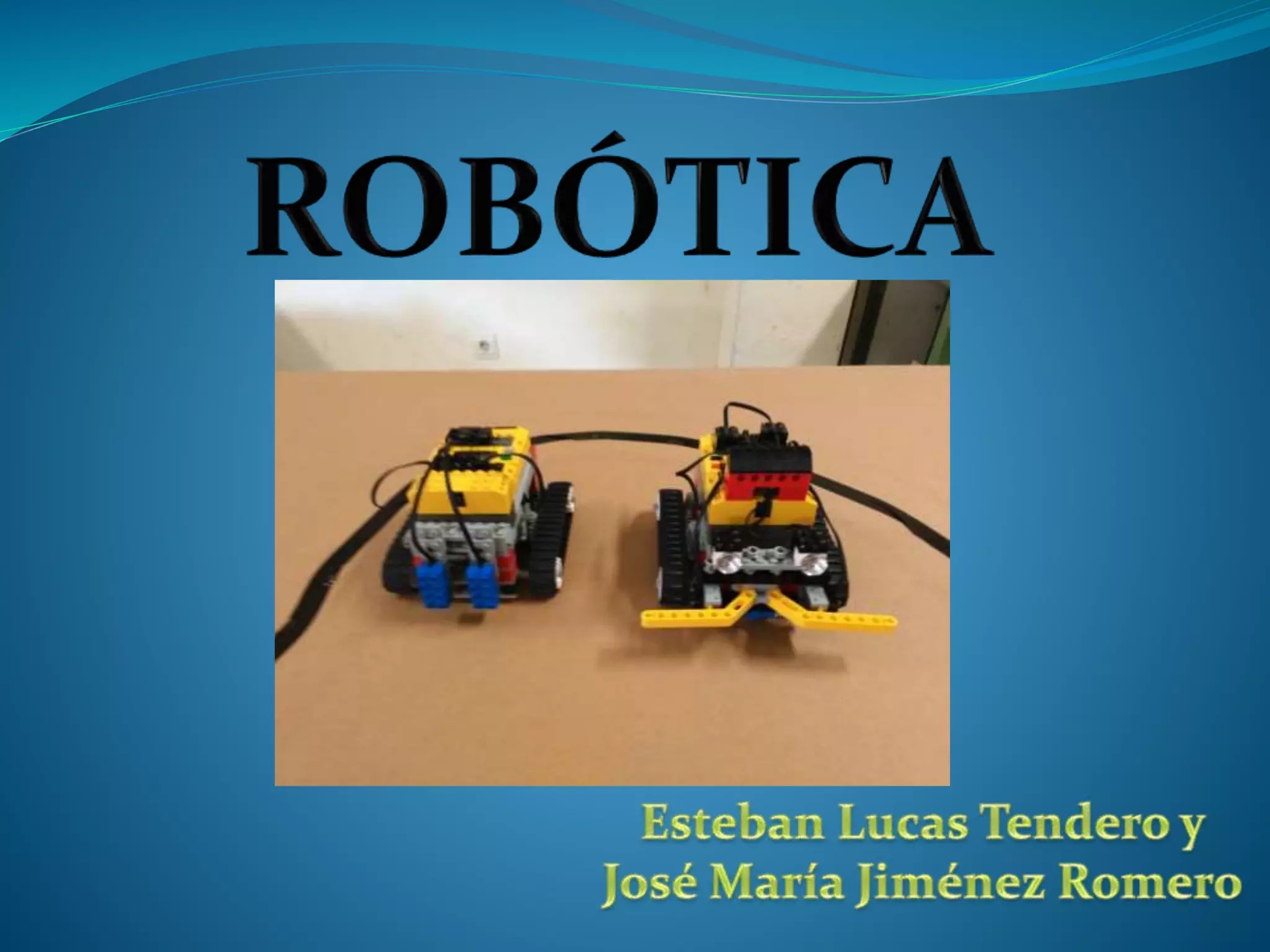

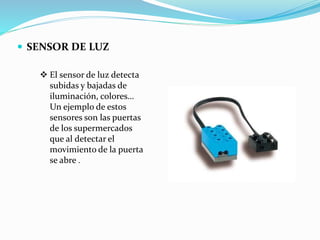

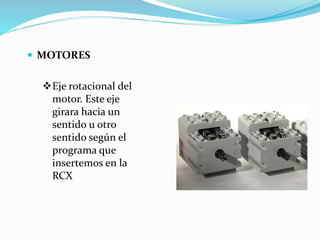
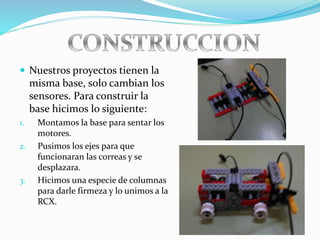




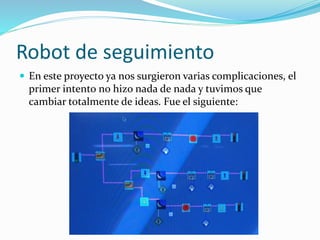
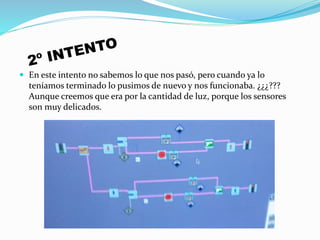
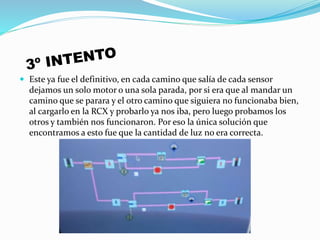

El documento describe la construcción y programación de dos robots. Explica las partes de cada robot, incluyendo sensores y motores. Detalla los pasos para construir la base común y los mecanismos específicos de cada robot. También discute los desafíos encontrados al programar el robot de seguimiento y cómo se resolvieron modificando el programa y la sensibilidad a la luz.