Descargado 907 veces












![HISTORIA
[editar] Diseño híbrido digital
El modelo híbrido digital fue popular en la mitad de los años 1980. Éste
utilizaba técnicas analógicas para tomar medidas y procesaba los parámentros
de entrada del motor, luego usaba una tabla almacenada en una
memoria de solo lectura para obtener los valores de salida. Sistemas
posteriores procesarian estas salidas dinámicamente. Este tipo de sistemas con
memoria de solo lectura son fáciles de modificar si uno conoce bien el sistema.
La desventaja de estos sistemas es que los valores preprocesados son sólo
óptimos para un nuevo motor ideal. Este sistema no tiene la eficiencia de un
sistemba basado en una unidad central de procesamiento.
Los sistemas de control de motor sofisticados reciben entradas de otras
fuentes, y controlan más partes del motor; como por ejemplo, los sistemas de
control del tiempo de distribución de válvulas son controlados
electrónicmaente así como el funcionamiento del turbocompresor. Éstos
además se deben comunicar con las unidades de control de transmisión o
directamente con la interfaz que controla la transmisión de forma automática,
sistemas de control de tracción y más sistemas con funciones similares. El cable
CAN (controller area network) es frecuentemente utilizado para conseguir la
comunicación entre estos dispositivos.](https://image.slidesharecdn.com/4-121104151901-phpapp01/85/Sensores-y-E-C-U-15-320.jpg)




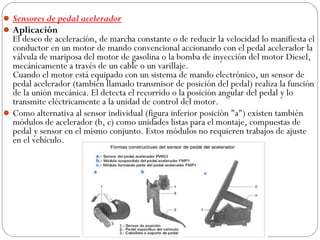
El documento describe sensores y unidades de control electrónico (ECU) en vehículos. Explica que los sensores miden variables físicas y químicas y las convierten en señales eléctricas que son leídas por la ECU. La ECU controla aspectos como la inyección de combustible, el encendido y la distribución basándose en las señales de los sensores.


































































































