Descargar como PDF, PPTX

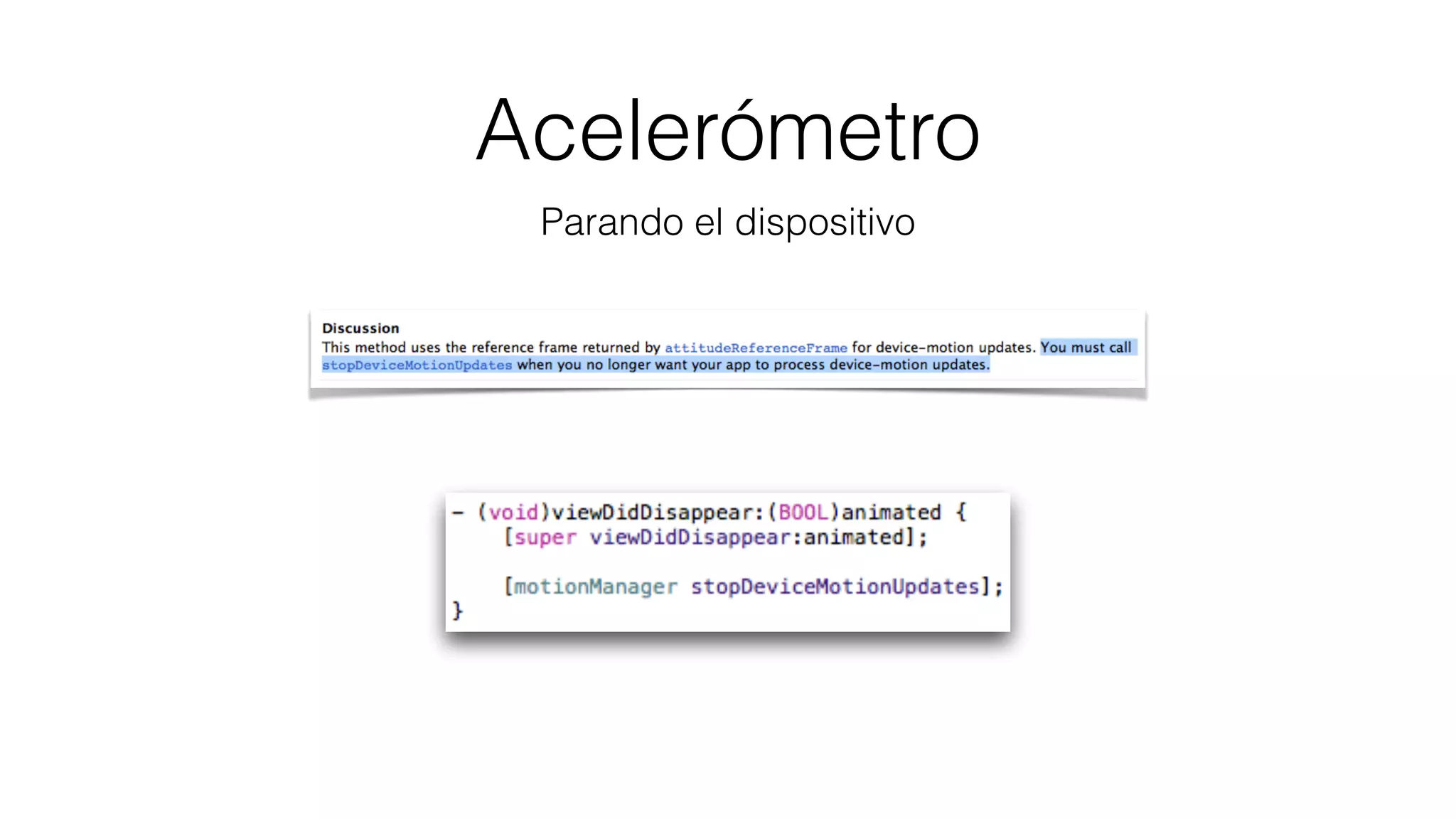



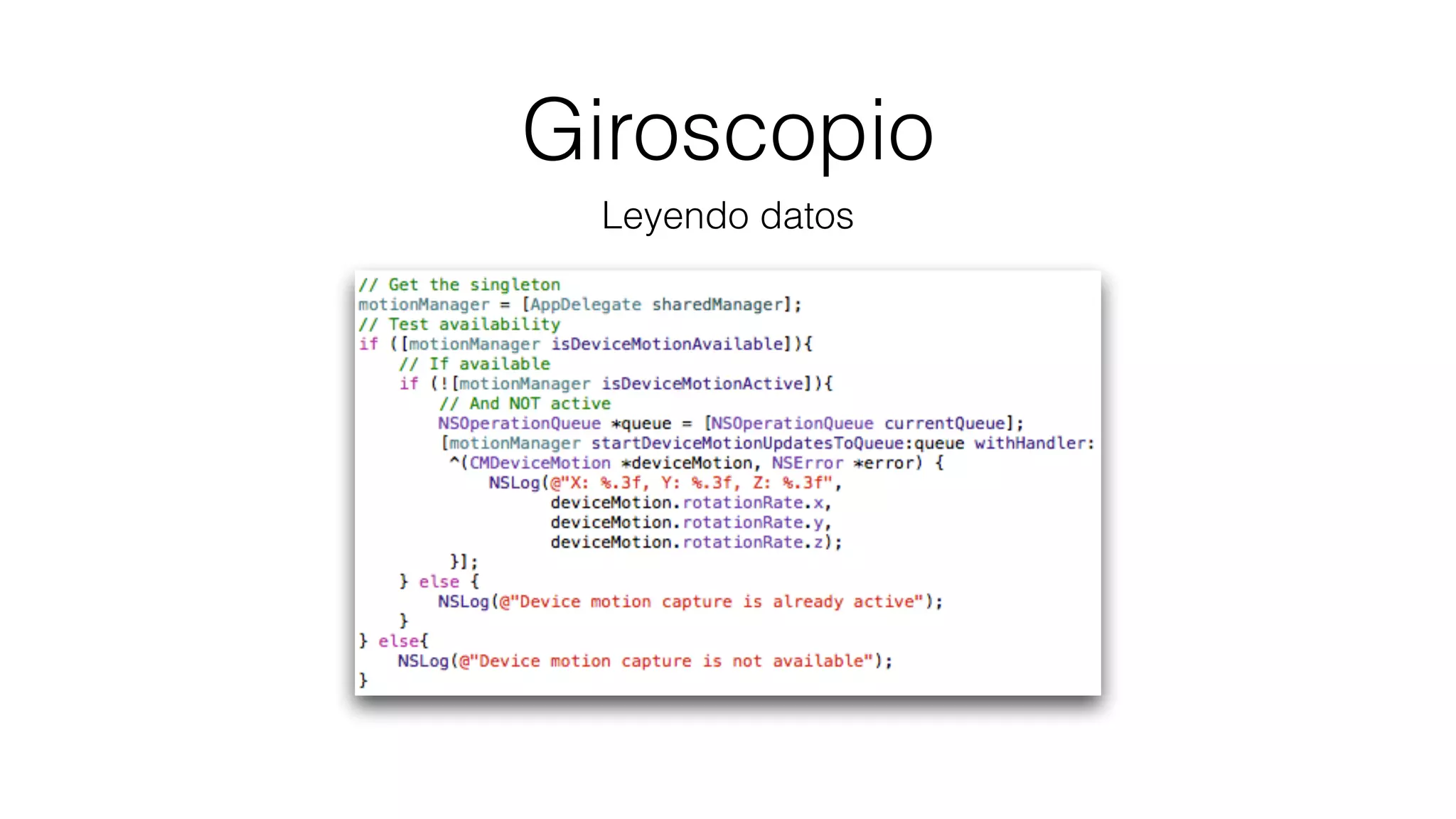
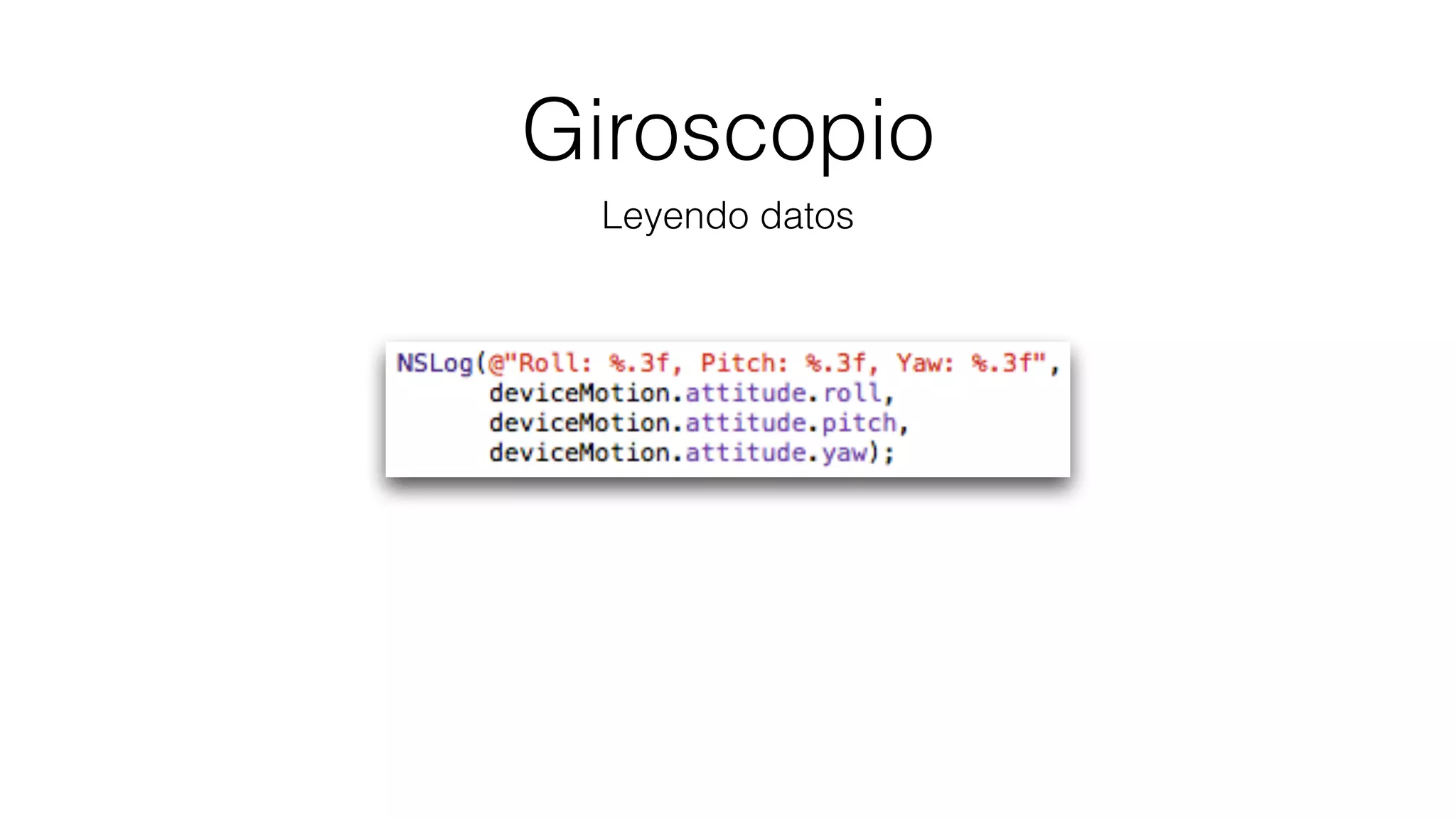
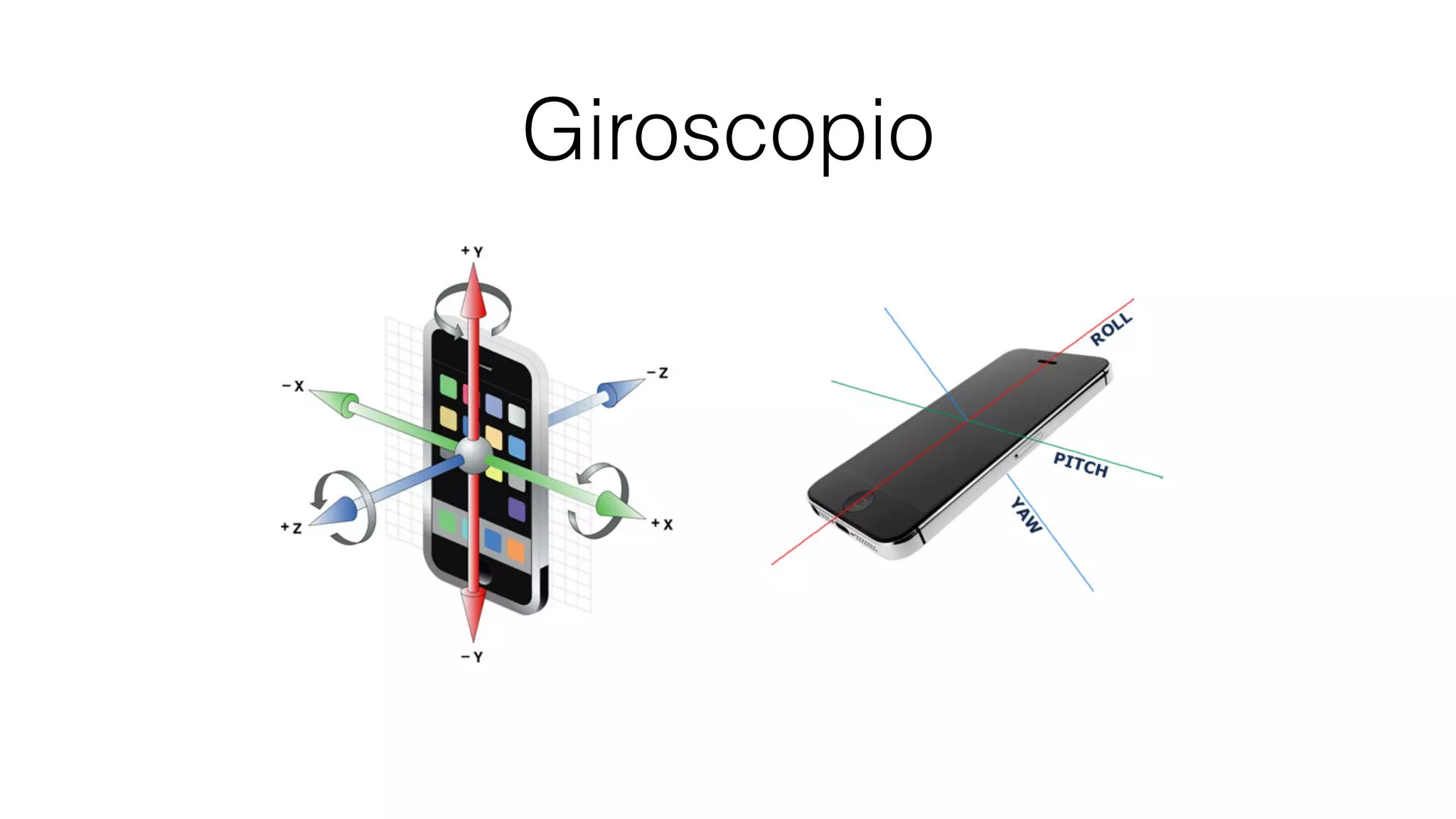

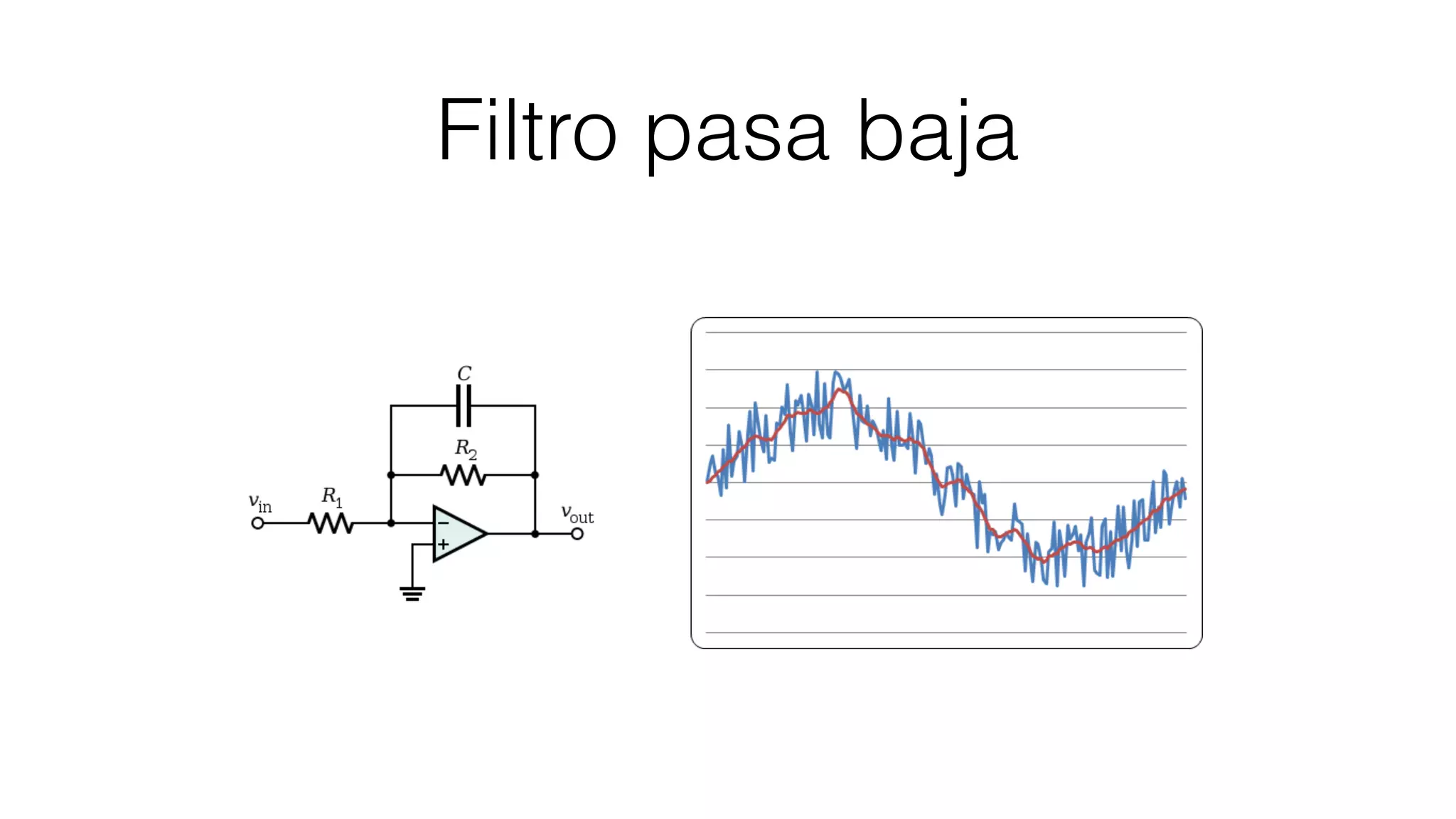
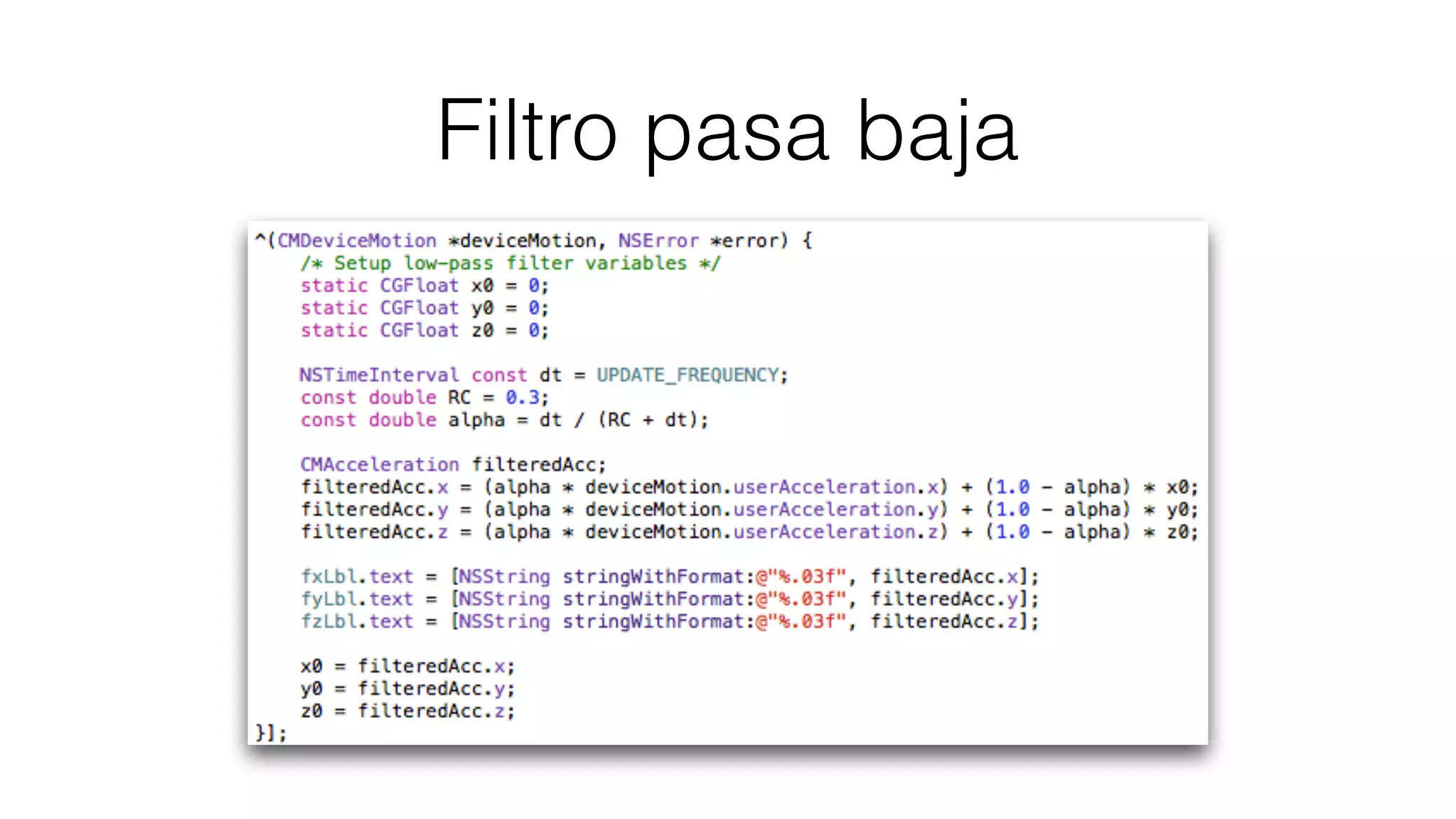


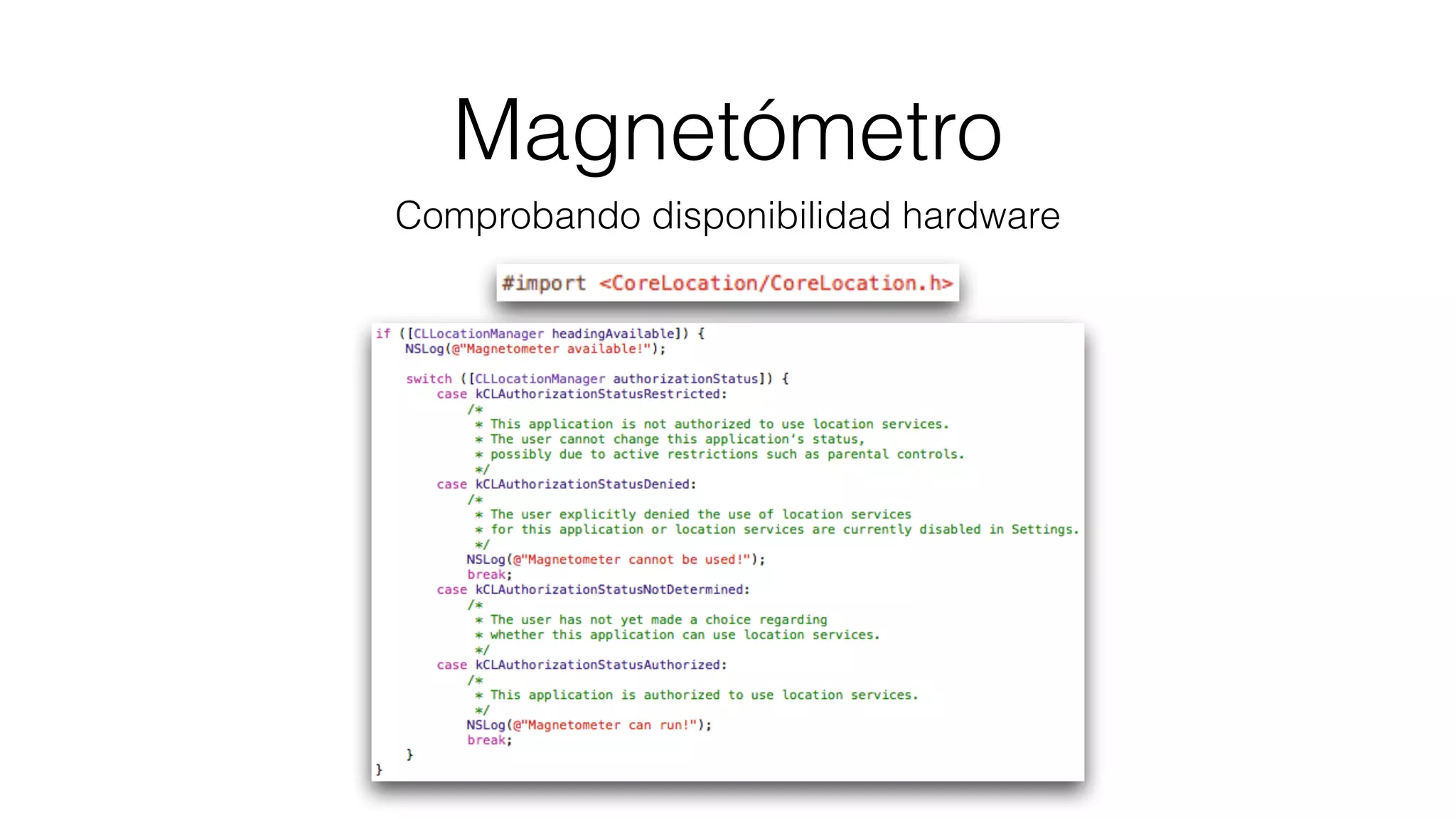



El documento detalla el funcionamiento y aplicaciones de diversos sensores como acelerómetros, giroscopios, magnetómetros, sensores de proximidad y luz ambiental. Cada sensor se describe con su unidad de medida, usos y forma de lectura de datos. Además, se mencionan buenas prácticas para asegurar la disponibilidad y precisión del hardware.






























































































