Descargado 12 veces



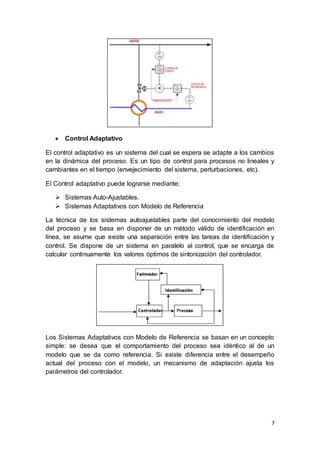
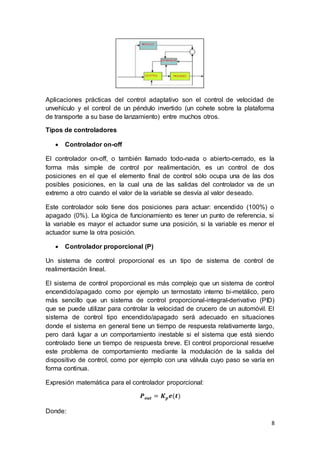


Este documento resume los principales tipos de sistemas de control, incluyendo control por realimentación, control de adelanto, control en cascada y control adaptativo. Describe los controladores on-off, proporcional, proporcional-integral y proporcional-derivativo, explicando sus ecuaciones matemáticas y cómo cada uno corrige errores en el proceso controlado. El objetivo general es entender cómo operan los sistemas de control y sus diversas configuraciones.



























































