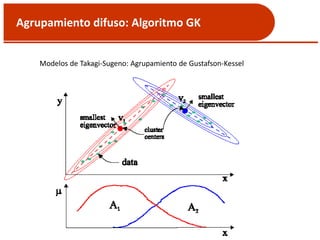
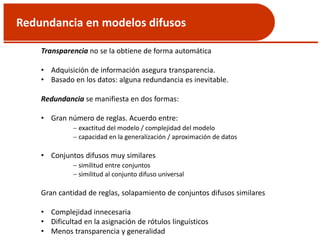
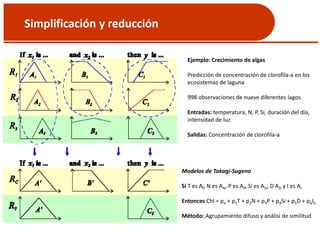
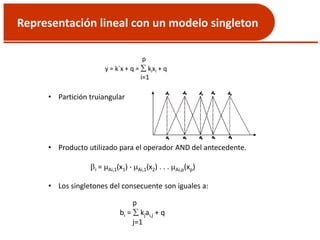
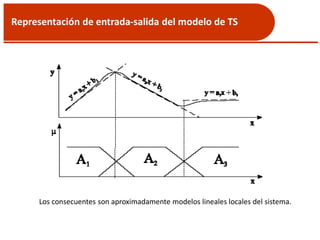
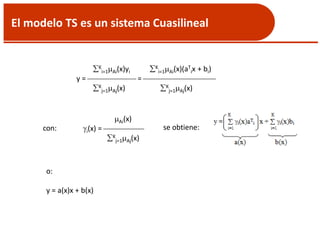
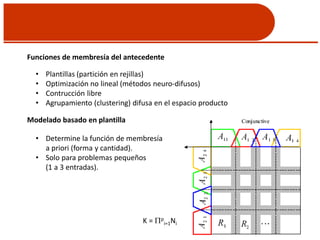
Este documento describe diferentes métodos para el modelado de sistemas dinámicos utilizando modelos difusos. Explica conceptos como modelos de Takagi-Sugeno, estimación de parámetros, agrupamiento difuso, simplificación de reglas y redundancia en modelos difusos. También incluye un ejemplo de aplicación de un modelo difuso de Takagi-Sugeno para la predicción de la concentración de clorofila en lagos.
![Modelado de sistemas dinámicos
ny
aijy(k j + 1)
j=1
nu
biju(k j + 1) + ci
j=1
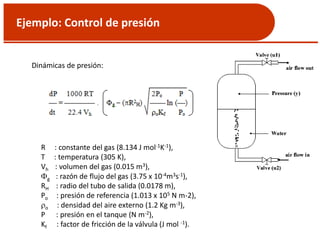
Modelo con regresión no lineal:
y(k+1) = F[y(k), . . . , y(k ny + 1), u(k), . . . , u(k nu + 1)]
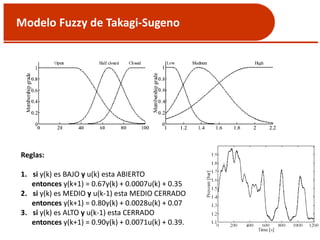
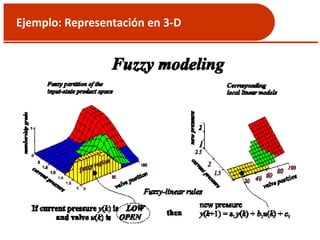
En forma de regla (ejemplo modelo de Takagi-Sugeno):
si y(k) es pequeño y u(k) es pequeño
entonces y(k+1) =](https://image.slidesharecdn.com/sistemasdifusos-130926070251-phpapp02/85/Sistemas-Difusos-2-320.jpg)
![Estimación por mínimos cuadrados de Singletons
Ri : si x1 es Ai1 y . . . y xp es Aip entonces y = bi
• Dado Aij y un conjunto de datos de entrada y salida: Z = {xk, yk I k = 1, 2, . . ., N}
• Estimación de los parámetros del consecuente optimos bi
1. Calcule el grado de compromiso i(xk) = Ai1(x1k) Ai2(x2k) . . . Aip(xpk)
2. Normalice: i(xk)
ki =
K
j(xk)
j=1
La salida es una combinación lineal convexa de entradas:
K
y = kibi, o y = b
i=1
3. Estimación por mínimos cuadrados:
b = [T]-1Ty](https://image.slidesharecdn.com/sistemasdifusos-130926070251-phpapp02/85/Sistemas-Difusos-7-320.jpg)
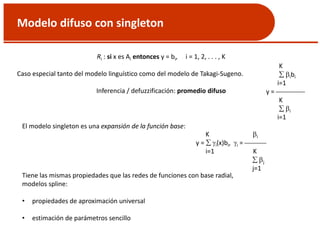
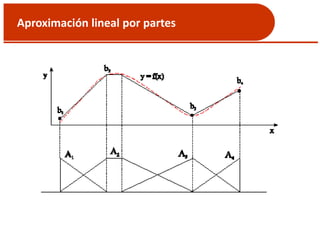
![Modelo difuso de Takagi-Sugeno (TS)
Ri : si x es Ai entonces yi = aT
ix + bi, i = 1, 2, . . . , K
• Funciones de membresía multi variables:
Ai(x) : p [0, 1]
• Antecedente de la regla en forma conjuntiva:
i : si x1 es Ai1 y . . . y xp es Aip entonces . . .
• Salida del modelo dado por el promedio difuso ponderado:
K
i=1 Ai(x)yi K
i=1Ai(x)(aT
ix + bi)
y = =
K
i=1Ai(x) K
i=1Ai(x)](https://image.slidesharecdn.com/sistemasdifusos-130926070251-phpapp02/85/Sistemas-Difusos-8-320.jpg)
![Estimación por mínimos cuadrados de los consecuentes
i = [aT
i bi]T, Xe = [X 1]
i = 1, 2, . . . , K
• LS global:
´ = [(X´)TX´]-1(X´)Ty
con
X´ = [W1Xe W2Xe . . . WKXe]
y
• LS local:
i = [(Xe)TWiXe]-1(Xe)TWiy](https://image.slidesharecdn.com/sistemasdifusos-130926070251-phpapp02/85/Sistemas-Difusos-11-320.jpg)
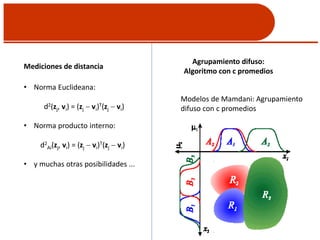
![Agrupamiento difuso
Centros del grupo (promedio):
V = [v1 v2]
Matriz de partición difusa:](https://image.slidesharecdn.com/sistemasdifusos-130926070251-phpapp02/85/Sistemas-Difusos-13-320.jpg)

![Algoritmos de agrupamiento difusos
Dado los datos
zk = [z1k, z2k, . . . , zNk]T n, k = 1, . . . , N
Encuentre:
la matriz de partición:
y los centros del grupo:
V = {v1, v2, . . . , vc}, vi n](https://image.slidesharecdn.com/sistemasdifusos-130926070251-phpapp02/85/Sistemas-Difusos-15-320.jpg)
![Algoritmo de Gustafson-Kessel (GK)
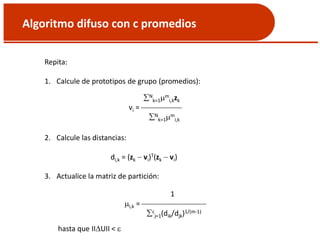
Repite:
1. Calcula prototipos del grupo (promedios):
N
m
i,kzk
k=1
vi =
N
m
i,k
k=1
2. Calcula las matrices de covarianza del grupo:
N
m
i,k(zk vi)T(zk vi)
k=1
Fi =
N
m
i,k
k=1
3. Calcula las distancias:
dik = (zk vi)T[idet(Fi)1/nF-1
x] (zk vi)
4. Actualiza la matriz de partición
1
ik =
c
(dik/djk)1/(m-1)
j=1
hasta IIUII<](https://image.slidesharecdn.com/sistemasdifusos-130926070251-phpapp02/85/Sistemas-Difusos-18-320.jpg)