
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Similar a Logica Difusa
Similar a Logica Difusa (20)
Más de SIRIUS e-Learning
Más de SIRIUS e-Learning (20)
Último
Último (20)
Logica Difusa
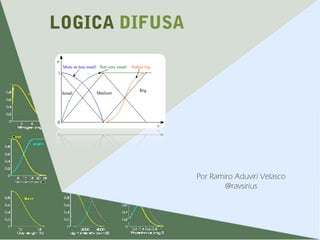
- 1. Por Ramiro Aduviri Velasco @ravsirius
- 2. Proposiciones compuestas de lógica difusa Small = Short y Light (conjunción) small(h, w) = short(h) Light(w)
- 3. Relaciones clásicas La relación clásica representa la presencia o ausencia de interacción entre los elementos de dos o más conjuntos. Ejemplo: X ={English, French} Y = {dólar, pound, franc, mark} Z = {USA, France, Canada, Britain, Germany} R(X, Y, Z) = {(English, dolar, USA), (French, franc, France), (English, dolar, Canada), (French, dolar, Canada), (English, pound, Britain)}
- 4. Extensión cilíndrica extx2(A) = {A(x1)/(x1, x2) I (x1, x2) X1 x X2} Proyección proyx2(A) = {(x1, sup A(x1, x2) I x1 X1)} x2X2
- 5. Producto Cartesiano Una operación entre conjuntos difusos definido en diferentes dominios, que resulta de un conjunto difuso multidimensional. Ejemplo: A1 A2 en X1 x X2
- 6. Relaciones difusas Con relaciones difusas, el grado de asociación (correlación) es representado por grados de membresía. Una relación difusa de dimensión n es una representación R : X1 x X2 x . . . x Xn [0, 1] la cual asigna grados de membresía a todos los n-tuples (x1, x2,, . . . ,xn) a partir del universo del producto Cartesiano.
- 7. Composición de relaciones R(X, Y) = P(X, Y) o Q(Y, Z) Condiciones: (x, y) R si existe y Y tal que (x, y) P y (y, z) Q. Composición max-min PoQ(x, z) = max min[P(x, y), Q(x, z)] yY Composición relacional Dada la relación difusa R en X x Y y el conjunto difuso A definido en X, deriva el conjunto difuso correspondiente B definido en Y: B = A o R = proyY(extXxY(A) R) Composición max-min B(y) = max min [A(x), B(x, y)] x x,y Análogo a evaluar una función.
- 8. Interpretación gráfica Función convencional: Función intervalo: Relación difusa:
- 9. Composición max-min: Ejemplo B(y) = max min[A(x), R(x, y)], y x x Sistemas difusos Envuelve conjuntos difusos como parámetros o variables Sistemas con parámetros difusos Entradas y/o estados difusos Sistemas difusos basados en reglas: Si el poder calorífico es alto Entonces la temperatura subirá rápido
- 10. Modelo lingüístico difuso (Mamdani) Si x es A entonces y es B Modelo relacional difuso Si x es A entonces y es B1(0.1), B2(0.8) Modelo difuso de Takagi-Sugeno Si x es A entonces y = f(x) Sistema dinámico difuso Sistemas basados en reglas
- 11. Modificadores lingüísticos: Ejemplo muy(A) = 2 A mas o menos(A) = a
- 12. Modelo Lingüístico Si x es A entonces y es B x es A antecedente (proposición difusa) y es B consecuente (proposición difusa) Proposiciones compuestas (conectivos lógicos, hedges): Si x1 es muy grande y x2 es no pequeño
- 13. Partición del Espacio Antecedente
- 14. Mecanismo de Inferencia Dado las reglas si-entonces y un conjunto difuso de entrada, se deduce el correspondiente conjunto difuso de salida. • Planteamiento formal basado en relaciones difusas: 1. Representa cada regla si-entonces como una relación difusa. 2. Agrega estas relaciones en una relación representativa para toda la base de reglas. 3. Dada una entrada, usa la composición relacional para derivar la salida correspondiente. • Planteamiento simplificado (inferencia de Mamdani) • Interpolación (Sistemas difusos aditivos)
- 15. Reglas de Inferencia en Modus Ponens Lógica clásica Si x es A entonces y es B x es A y es B Lógica difusa Si x es A entonces y es B x es A´ y es B´
- 16. Implicaciones y Conjunciones difusas La implicación difusa es representada como una relación difusa: R : [0, 1] x [0, 1] [0, 1] R(x, y) = I(A(x), B(y)) I(a, b) función de implicación “clásico” Kleene-Diene I(a, b) = max(1 a, b) Lukasiewicz I(a, b) = min(1, 1 a + b) tnormas Mamadani I(a, b) = min(a, b) Larsen I(a, b) = a b)
- 17. Inferencia con una regla Construir la relación de implicación: R(x, y) = I(A(x), B(y)) Use composición relacional para derivar B´ de A´ B´ = A´ o R R(x, y) = min(A(x), B(y))
- 18. Ilustración gráfica B´(y) = maxx minx(A´(x), R(x, y))
- 19. Inferencia con varias reglas 1. Cuando la implicación es el operador conjunción: Cada regla es representado por una relación difusa en X Y: Ri = Ai x Bi R(x, y) = Ai(x) Bi(y) 2. La relación en conjunto de la base de reglas es la unión: 3. Dado un valor de entrada A´ el valor de salida B´ es: B´ = A´ o R B(y) = max X [A(x) R(x, y)]
- 20. Planteamiento simplificado 1. Calcule el matrimonio entre la entrada y la función de membresía del antecedente (grado de compromiso). 2. Recorte el conjunto difuso de salida correspondiente para cada regla utilizando el grado de compromiso. 3. Ponga los conjuntos difusos de salida de todas las reglas en un conjunto difuso. A esto se llama método de inferencia de Mamdani o max-min.
- 21. Ejemplo: Control del nivel de líquido Si es nivel es bajo entonces incremente en abrir válvula Si es nivel es OK entonces mantenga en abrir válvula Si es nivel es alto entonces reduzca en abrir válvula
- 22. Inferencia difusa: Etapas 1 y 2 Recorta la función de membresía del consecuente de la segunda y tercera regla.
- 23. Agregado Combina los resultados de las dos reglas (unión) Defuzzificación Conversión de un conjunto difuso a un valor convencional.
- 24. Método del Centro de Gravedad: Inferencia y Defuzzificación difusas
- 25. Componentes del sistema difuso
- 26. Modelos no Lineales Modelos en el espacio de estado • Continuo: x(t) = f(x(t), u(t), t) y(t) = g(x(t), u(t), t) • Discreto: x(k+1) = f(x(k), u(k), k) y(k) = g(x(k), u(k), k) Modelos de entrada-salida • Continuo: y(n)(t) = f(y(n-1)(t), . . . , y(t), u(m)(t), . . . , u(t)) • Discreto : y(k+1) = f(y(k), y(k-1), . . . , y(k-ny + 1), u(k), u(k-1), . . . , u(k-ny + 1))
- 27. ¿Cómo obtener modelos? Físico (modelado mecánico) 1. Principios básicos Ecuaciones diferenciales (no lineal) 2. Linealización en torno a un punto de operación Identificación del sistema 1. Medición de datos de entrada y salida (en torno al punto de operación) 2. Postulado de la estructura del modelo (lineal, no lineal, orden) 3. Estimación de los parámetros del modelo a partir de datos (mínimos cuadrados) Combinación de las dos.
- 28. Identificación del sistema y(1), y(2), . . . , y(N)
- 29. Formulación del problema de modelado x(k+1) = f(x(k), u(k)) y(k) = g(x(k)) x(k) = [y1(k), . . . , y1(k p1 + 1), . . . , yp(k), . . . , yp(k pp + 1), u1(k), . . . , u1(k m1 + 1), . . . , um(k), . . . , um(k mm + 1)]T y(k+1) = f(x(k))