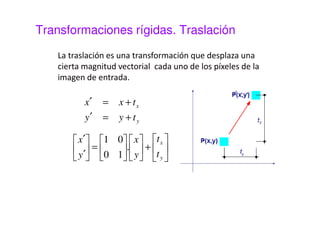
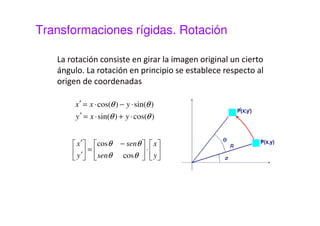
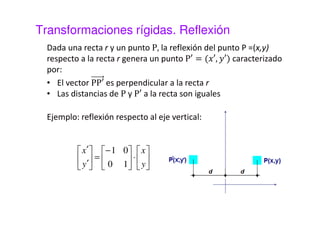
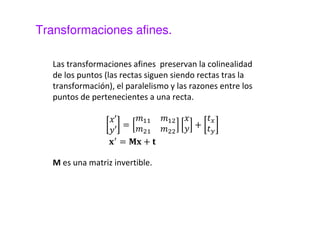
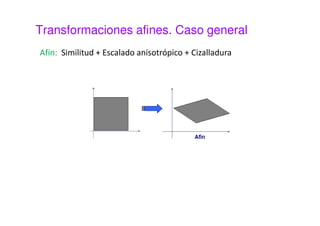
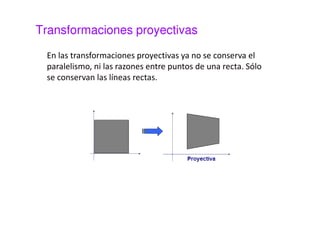
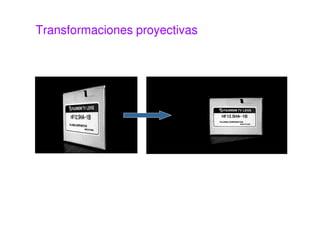
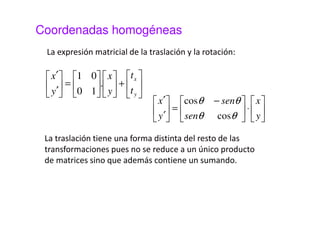
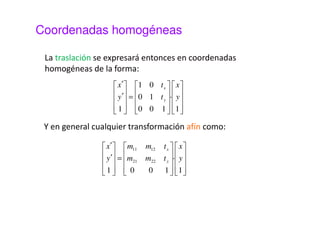
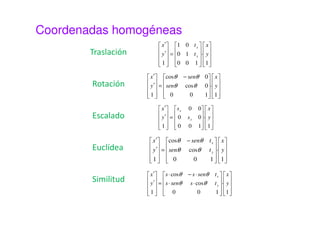
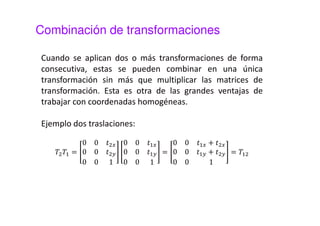
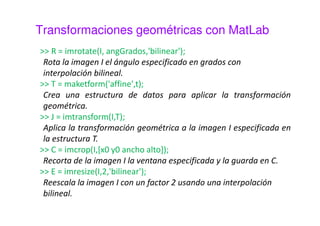
Este documento presenta una sesión sobre transformaciones geométricas de imágenes digitales. Explica los diferentes tipos de transformaciones como rígidas, afines y proyectivas, detallando operaciones como traslación, rotación, escalado y cizalladura. También introduce el uso de coordenadas homogéneas para representar las transformaciones de forma uniforme mediante matrices. Finalmente, muestra cómo aplicar transformaciones geométricas y combinarlas usando MATLAB.