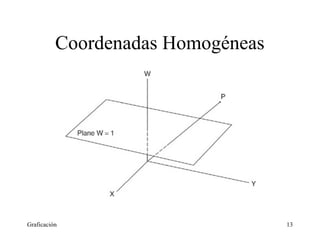
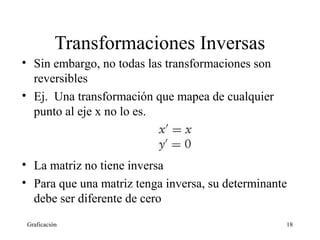
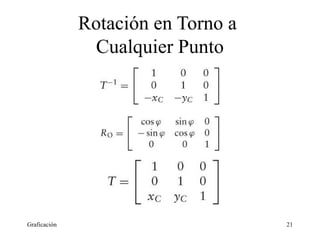
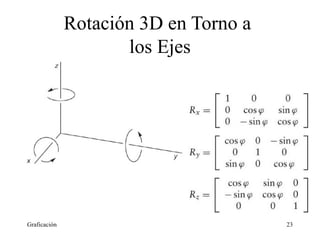
Este documento describe diferentes tipos de transformaciones geométricas, incluyendo rotaciones, escalamiento, acizallamiento, translaciones y rotaciones en 3D. Explica cómo estas transformaciones pueden representarse mediante productos de matrices y coordenadas homogéneas. También cubre conceptos como transformaciones inversas y rotaciones en torno a puntos arbitrarios.































































![CoworkingTeletravail SP_FR [Compatibility Mode]](https://cdn.slidesharecdn.com/ss_thumbnails/b38d8632-dd58-4773-bef4-0c49e3995441-150623122542-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)













































