
Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a CINEMÁTICA RECTILÍNEA.ppt
Similar a CINEMÁTICA RECTILÍNEA.ppt (20)
Último
Último (20)
CINEMÁTICA RECTILÍNEA.ppt
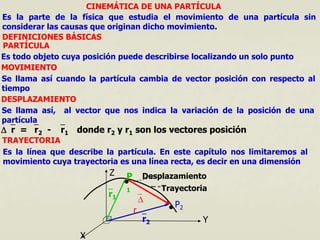
- 1. CINEMÁTICA DE UNA PARTÍCULA Es la parte de la física que estudia el movimiento de una partícula sin considerar las causas que originan dicho movimiento. DEFINICIONES BÁSICAS PARTÍCULA Es todo objeto cuya posición puede describirse localizando un solo punto MOVIMIENTO Se llama así cuando la partícula cambia de vector posición con respecto al tiempo DESPLAZAMIENTO Se llama así, al vector que nos indica la variación de la posición de una partícula r = r2 - r1 donde r2 y r1 son los vectores posición TRAYECTORIA Es la línea que describe la partícula. En este capítulo nos limitaremos al movimiento cuya trayectoria es una línea recta, es decir en una dimensión X Y Z r1 r2 r Desplazamiento Trayectoria P 1 P2
- 2. MOVIMIENTO RECTILÍNEO Si el movimiento se realiza en una línea recta, como por ejemplo el eje X, solo existe dos sentidos posibles para los vectores desplazamiento, velocidad y aceleración: El sentido hacia la derecha (i ) y el sentido hacia la izquierda ( -i ). +x -x 5i -5i Muchas veces, el estudiante no desea trabajar en forma vectorial y solo para el movimiento rectilíneo, se puede emplear el siguiente criterio. Si el vector apunta hacia la derecha se escribirá el signo ( + ) y si apunta hacia la izquierda se escribirá el signo negativo ( - ). 1. POSICIÓN Para cualquier instante “t” la partícula tendrá una posición representada por la coordenada del punto, tal como P, es decir la coordenada (x) 0 +x -x r r1 x El vector posiciónr, se expresa por: r =xi ó r = x El vector posiciónr1, se expresa por: r1= - xi ó r = -x Si para cada instante “t” se conoce la coordenada de la partícula, entonces se conocerá el movimiento de la partícula y a la relación: r = f (t) se le llamará LEY DEL MOVIMIENTO
- 3. EJEMPLO: Una partícula tiene un movimiento en línea recta, cuya ley del movimiento está dada por: x = 3 t2 + t -2, donde “x” está en (m) y “t” en (s). Hallar la posición de la partícula para los tiempos: t = 2 s y t = 3 s. SOLUCIÓN x3 = 3(3)2 + 3 -2 x3 = 28 x2 = 3(2)2 + 2 -2 x2 = 12
- 4. 2. DESPLAZAMIENTO La variación de la posición de la partícula entre los puntos P(x1) y Q(x2), se denomina vector desplazamiento (r ) Q(x2) P(x1) r1 r r2 0 X El vector desplazamiento se expresa por: r =r2 -r1 ó r = ( x2 – x1 )i ó r = ( x2 - x1 ) Si el resultado de restar se obtiene una cantidad positiva el vector desplazamiento se dirige hacia la derecha y si es una cantidad negativa se dirige hacia la izquierda
- 5. EJEMPLO Una partícula tiene un movimiento en línea recta, cuya ley del movimiento está dada por: x = 3 t2 - 2 t +5, donde “x” está en (m) y “t” en (s). Hallar el vector desplazamiento entre t = 2 s y t = 3 s. SOLUCIÓN x3 = 3 (3)2 - 2 (3) +5 x3 = 27 - 1 x3 = 26 x2 = 3 (2)2 - 2 (2) +5 x2 = 12 +1 x2 = 13 x = x3 – x2 = 13
- 6. 3. VELOCIDAD MEDIA (vm ) Se define el módulo de la velocidad media de una partícula como el cociente entre el desplazamiento (x) y el intervalo de tiempo (t), es decir: 1 2 1 2 m t - t x - x t x v El sentido del desplazamiento y la velocidad media pueden ser positivas (+i ) o negativas (-i ), dependiendo de que si x2 es mayor o menor que x1
- 7. INTERPRETACIÓN GEOMÉTRICA DE LA VELOCIDAD MEDIA Sea la gráfica de la posición (x) en función del tiempo (t) para una partícula con movimiento rectilíneo x2 t1 t2 t (s) x (m) x = x2 – x1 t = t2 – t1 x = f(t) P2 P1 x1 la velocidad media esta dada por: 1 2 1 2 m t - t x - x t x v
- 8. x2 t1 t2 t (s) x (m) x = x2 – x1 t = t2 – t1 x = f(t) P2 P1 x1 En la gráfica se observa que la pendiente de la recta P1P2 esta dada por: 1 2 1 2 t - t x - x tg m Podemos concluir que vm = m “La pendiente de la recta que pasa por los puntos P1 (t1 ,x1) y P2(t2 ,x1) nos da el valor de la velocidad media”
- 9. EJEMPLO Una partícula con movimiento rectilíneo tiene con ecuación de movimiento a: x = 3t2 - 5 Hallar el vector velocidad media para t = 2 s y t = 1 s SOLUCIÓN x2 = 3 (2)2 – 5 = 7 x1 = 3 (1)2 – 5 = - 2 x2 – x1 = 7 – (- 2) = 9 t2 – t1 = 2 - 1 = 1 1 2 1 2 m t - t x - x v m/s 9 1 9 vm m/s i 9 vm
- 10. 4. VELOCIDAD INSTANTÁNEA (v ) Se llama velocidad instantánea al límite del cociente cuando “t” tiende a cero, es decir: t x lim v 0 t A este límite se le denomina la derivada de la posición (x) con respecto a el tiempo (t), es decir: t d x d v
- 11. INTERPRETACIÓN GEOMÉTRICA DE LA VELOCIDAD INSTANTÁNEA Sea la gráfica de la posición (x) en función del tiempo (t) Cuando se hace disminuir el intervalo de tiempo ( t ), la recta P1P2 tiende a ser una recta tangente en el punto P. x2 t1 t2 t (s) x (m) x = x2 – x1 t = t2 – t1 x = f(t) P2 P1 x1 Recta tangente en P1 El valor de la velocidad instantánea en P1 es la pendiente de la recta tangente en P1.
- 12. OBSERVACIÓN Es importante distinguir entre velocidad media ( vm ) y velocidad instantánea (v). Sin embargo la palabra velocidad sólo se emplea como velocidad instantánea El valor numérico de la velocidad instantánea a veces se le denomina “rapidez”
- 13. EJEMPLO Una partícula con MR tiene como ecuación del movimiento a: x = 16 t2 en donde “x” se mide en metro y “t” en segundos, hallar: a) La velocidad instantánea para cualquier tiempo ( t ) b) La velocidad instantánea para t = 3 s SOLUCIÓN 2 t 16 x 1 - 2 t (2) 16 t d x d 1 t 32 t d x d v (3) 32 v3 m/s 96 v3
- 14. EJEMPLO El movimiento de una partícula se define por la relación: x = 2 t2 – 20 t + 60, donde “x” está en metro y “t” en segundo. Calcular: a) La posición de la partícula al inicio del movimiento b) La velocidad instantánea para t = 1 s c) El tiempo en la cual la velocidad es cero d) Interprete la respuesta anterior. e) El espacio total recorrido cuando el tiempo es 6 s. SOLUCIÓN a) Para t = 0 se dará el inicio del movimiento Para t = 0 x0 = 2(0)2 – 20 (0) + 60 = 60 m 20 - t 4 t d x d v b) m/s 16 - 20 - (1) 4 t d x d v 0 20 - t 4 v c) s 5 t
- 15. Recta tangente t (s) x (m) x = f(t) v v1 Recta paralela al eje t v2 V = 0 ?? 60 m t = 0 t = 5 10 m v = 0 Para t = 6 x6 = 2(6)2 – 20 (6) + 60 = 12 m 12
- 16. Espacio total recorrido será d = | 60 – ( 10) | + | 12 – ( 10) | d = | 50 | + | 2 | d = 52 m
- 17. 5. ACELERACIÓN MEDIA ( am ) Se define aceleración media como la variación de la velocidad instantánea ( v ) con respecto a la variación del tiempo ( t ), es decir: 1 2 1 2 m t - t v - v t v a ACELERACIÓN INSTANTÁNEA ( a ) Es el límite del cociente (v / t ) cuando t tiende a cero, a este límite se le llama derivada de la velocidad instantánea con respecto al tiempo, es decir t d v d a Para realizar esta derivación se debe tener la siguiente función: v = f (t)
- 18. También: ) t d x d ( t d d t d v d a 2 2 t d x d a Que viene a ser la segunda derivada de ( x ) con respecto al tiempo ( t )
- 19. EJEMPLO Una partícula tiene un MR, donde la posición viene dada por la ecuación: x = 3 t2 siendo “t” el tiempo en segundo y “x” la posición en metro. Hallar: La velocidad instantánea para cualquier tiempo “t” La aceleración instantánea para cualquier tiempo “t” La aceleración instantánea para t = 3 s SOLUCIÓN x = 3 t2 v = 6 t a = 6
- 20. EJEMPLO El movimiento de una partícula se define por la relación: x = 2 t3 – 6 t2 + 15, donde “x” está en metro y “t” en segundo. Calcular el tiempo, la posición y aceleración cuando la velocidad es cero. SOLUCIÓN X = 2 t3 – 6 t2 + 15 v= 6 t2 – 12 t 6 t2 – 12 t = 0 t2 = 2 t t = 0 y t = 2 RPTA x0 = 2 (0)3 – 6 (0)2 + 15 x0 = 15 m RPTA x6 = 2 (2)3 – 6 (2)2 + 15 x6 = 7 m RPTA v= 6 t2 – 12 t a= 12 t – 12 a0 = 12 (0) – 12 a0 = – 12 m/s2 RPTA a6 = 12 (2) – 12 a6 = 12 m/s2 RPTA
- 21. EJEMPLO La aceleración de una partícula se define por la relación: a = - k x. Encontrar el valor de “k” tal que v = 15 m/s cuando x = 0 y x = 3m cuando v = 0 SOLUCIÓN a = - k x kx dt dv kx dx dx dt dv kx dx dx dt dv kx dx dv v dx kx dv v dx kx dv v dx kx dv v 0 15 dx kx dv v 3 0 0 15
- 22. 3 0 2 0 15 2 2 x k 2 v dx kx dv v 3 0 0 15 dx x k dv v 3 0 0 15 2 0 2 3 k 2 15 2 0 2 2 2 2 0) - k(4,5 ) 5 , 112 0 ( k(4,5) 5 , 112 K = 25
- 23. MOVIMIENTO RECTILÍNEO UNIFORME (M.R.U) Es aquel movimiento donde su trayectoria es una línea recta y su velocidad es constante. DEDUCCIÓN DE LA FÓRMULA DEL M.R.U. En la gráfica se tienen una partícula con MR. Tal como el eje X. 0 X e dx x1 t1=0 x2 t t d x d v d x = v d t Por definición Integrando el primer miembro desde x1 hasta x2 y el segundo miembro desde el inicio del movimiento t1= 0 hasta t t 0 x x dt v dx 2 1
- 24. Como la “v” es constante t 0 x x dt v dx 2 1 Integrando x2 - x1 = v ( t -0 ) Según la gráfica e = v t Donde: e es el espacio recorrido o distancia en (m) t es el tiempo en (s) v es la velocidad en ( m/s )
- 25. PROBLEMA Un móvil va por una carretera y tiene un MRU con velocidad de 16 m/s; una persona se encuentra a 60 m de la carretera y, en determinado instante a 400 m del móvil. ¿Qué rapidez mínima suponiéndola constante con trayectoria rectilínea, debe desarrollar la persona para alcanzar el móvil? C● A v1 =16 H 60m 400m B v2 senos de Ley : ABC el En sen 400 sen AB (1) .... sen 400 sen t v1 : BCH el En BC 60 sen (2) ...... t v 60 sen 2 (2) y (1) De t v sen 400 t v 60 sen 1 2 sen 400 t v 60 t v 1 2 sen 20 v 3 v 1 2 1 sen si mínima, es v2 m/s 2,4 v , 20 (16) 3 v 2 2
- 26. PROBLEMA: La figura muestra la posición x en función del tiempo “t” para dos partículas. ¿En que instante las partículas están separadas 150 m? B A 2 5 20 80 X(m) t(s) b ) ( m/s 16 5 80 - tg vA 2 20 - b tg vB 5 80 2 b - 80 tg 48 b ) ( m/s 14 2 20 - 48 tg vB Al inicio A esta en 80 m y B en 20 m, es decir están separadas 60 m 14 m/s 16 m/s 60 m t 14 t t 16 t De la figura: (14 t – 60) + 16 t = 150 t = 7 s
- 27. EJEMPLO Dos móviles A y B parten simultáneamente con velocidadesvA =20i m/s y vB = -30i Desde puntos separados por una distancia de 800 m. ¿En que tiempo en segundo estarán separados una distancia de 100 m por primera vez? SOLUCIÓN
- 28. EJEMPLO Dos partículas A y B parten simultáneamente desde P(0,1) y Q(4,0) respectivamente: Si A y B se mueven a lo largo de las rectas mostradas en la figura para luego encontrarse en S, halle la relación vA / vB donde vA y vB son las rapideces constantes de A y B SOLUCIÓN (8.7) Q(4.0) P(0.1) A B X Y
- 29. MOVIMIENTO RECTILÍNEO UNIFORMEMENTE VARIADO:(MRUV) Es aquel movimiento cuya trayectoria es una línea recta y su aceleración es constante a través del tiempo DEDUCCIÓN DE LAS FÓRMULAS DEL MRUV 0 X e dx t1=0 x1 v1 x2 t v2 t d v d a t d a v d t 0 v v t d a v d 2 1 Haciendo la integración para: v2 v1 v2 - v1= a (t – 0) v2 = v1 + a t Haciendo la integración para: v1 v2 v2 = v1 - a t v2 = v1 a t
- 30. Similarmente se consigue las siguientes fórmulas 2 2 t a t v e 1 v2 2 = v1 2 2 a e t 2 v v e 2 1
- 31. PROBLEMA: Cuando un semáforo se pone en verde, un coche que esperaba el cruce arranca con aceleración constante de 2 m/s2. En ese instante a 100 m detrás del coche, avanza un camión con velocidad constante de 29 m/s. ¿A qué distancia respecto del punto inicial del camión, éste alcanza al coche por primera vez? ● v=0 a=2 100 m V=29 m/s xA xB 100 x x : gráfico Del A B 2 t a t v x 2 0A A 2 2 A t 2 t 2 0 x (MRU) t 29 xB Reemplazando 100 t t 29 2 100 100 t 29 - t2 25 y t 4 t 4) ( (29) t 29 xB m 116 xB
- 32. EJEMPLO El tiempo que demora una persona en percibir la luz y accionar los frenos de una automóvil es de 0,5 s. Si la desaceleración que puede ejercer cuando se acciona los frenos es de 5 m / s2. Hallar el espacio total recorrido antes de detenerse, una vez percibida la señal, cuando la velocidad es de 30 m/s SOLUCIÓN V = 30 m/s B A V = 30 m/s t =0,5s A: percibe la luz B: acciona los frenos C: móvil detenido C V = 0 a=5 m/s2 TRAMO AB t v AB (30)(0,5) AB (1) ....... m 15 AB TRAMO BC (BC) a 2 - v v 2 B 2 C (BC) (5) 2 - 30 0 2 2 C (2) ....... m 90 BC BC AB AC m 105 AC
- 33. EJEMPLO Una partícula describe una trayectoria rectilínea de tal manera que su posición está determinada según la gráfica adjunta. Determinar la gráfica velocidad versus tiempo. SOLUCIÓN t (s) x (m) 30 20 10 0 2 4 6 8
- 35. t (s) x (m) 30 20 10 0 2 4 6 8 Entre 0 y 2 s V = + 5 m/s Entre 2 y 4 s V = + 0 m/s Entre 4 y 6 s V = + 10 m/s Entre 6 y 8 s V = - 15 m/s t (s) v (m/s) 10 0 -10 -20 2 4 6 8 20
- 36. CAÍDA LIBRE DE LOS CUERPOS Es un caso especial del MRUV y se llama así al movimiento en el cual se desprecia la resistencia del aire y la pequeña variación de la aceleración debido a la altura con respecto a la Tierra La aceleración de un cuerpo que cae libremente se le llama aceleración de la gravedad ( g ) y cuyo valor para efectos de los problemas se tomará como: a = 9,8 m / s2 = 10 m / s2 Las fórmulas para este movimiento cumplen con las del MRUV, donde el espacio recorrido o distancia ( d ) se cambiará por ( h ) y la aceleración ( a ) por la aceleración de la gravedad ( g ), es decir vf = vi g t 2 t g t v h 2 i vf 2 = vi 2 2 g h t 2 v v h f i
- 37. EJEMPLO Se deja caer una esfera desde un globo que está elevándose con una velocidad constante de 9 m/s. Si la esfera tarda 10 s en alcanzar el suelo. ¿A que altura estaba el globo cuando se deja caer la esfera? SOLUCIÓN
- 39. MOVIMIENTO CURVILÍNEO Es aquel movimiento cuya trayectoria es una curva ( parábola, elipse, circunferencia, etc ). Sea una partícula en movimiento, cuya trayectoria curvilínea esta dada según la figura siguiente: r1 r2 r Trayectoria O Y X
- 40. r1 r2 r Trayectoria O Y X VECTOR POSICIÓN (r ) Es aquel vector que ubica a un punto de la trayectoria de una partícula en movimiento y puede variar con respecto al tiempo r = x i + y j con x = f (t) y = f (t) r = x(t) i + y(t) j VECTOR DESPLAZAMIENTO: r Es aquel vector que ubica un punto de la trayectoria con respecto a otro punto de la misma trayectoria. r = r2 - r1
- 41. EJEMPLO Las coordenadas de una partícula en movimiento están dadas por las siguientes ecuaciones: x = 2 t2 y =3 t – 1 donde x e y están en metros y t en segundo. Calcular el vector desplazamiento para la partícula para t = 1 s y t = 3 s SOLUCIÓN j y(t) i x(t) r1 j 1) - t 3 ( i ) (2t r 2 1 j 1) - 1 3 ( i (1) 2 r 2 1 x j 2 i 2 r1 j 1) - 3 3 ( i (3) 2 r 2 3 x j 8 i 18 r3 1 3 r r r j ) 2 8 ( i ) 2 18 ( r j 6 i 16 r
- 42. VELOCIDAD MEDIA ( vm, ) Es aquel vector que se define como el cociente entre el desplazamiento (r ) y el intervalo de tiempo ( t ), es decir: t r vm EJEMPLO Una partícula en movimiento curvilíneo está definida por: x = t2 – t + 1 y = 3 t Donde “x” e “y” están en metro y “t” en segundo. Calcular el vector velocidad media, el módulo y dirección entre t = 1 s y t = 3 s SOLUCIÓN
- 43. VELOCIDAD INSTANTÁNEA ( v ) El vector velocidad instantánea de una partícula en movimiento curvilíneo es la primera derivada del vector posición (r ) de la partícula con respecto a el tiempo La velocidad instantánea es tangente a un punto de la trayectoria. O Y X Trayectoria Línea Tangente v vY vX
- 44. O Y X Trayectoria Línea Tangente v vY vX t r lim v 0 x (t) f r con t d r d v Si v = vX i + vY j entonces t d y d y v t d x d v Y X El módulo del vector velocidad instantánea está dada por 2 Y 2 X 2 v v v También: t d y d t d x d v 2 2 2
- 45. EJEMPLO En un movimiento curvilíneo el vector posición de una partícula en función del tiempo está dada por: r = ( 2 t2 – 2 )i + ( t2 + t )j , donde r está en metro y t en segundo. Calcular el vector velocidad instantánea, su módulo y su dirección SOLUCIÓN
- 46. ACELERACIÓN MEDIA (a ) Sea una partícula en movimiento, cuya trayectoria curvilínea esta dada según la figura siguiente: Sean las velocidades instantáneasv1 yv2 para los puntos P1 y P2. Trayectoria O Y X v, siempre se dirige hacia la parte cóncava de la trayectoria P1 1 v P2 2 v 2 v 1 v v Se define la aceleración media de una partícula en el intervalo de tiempo ( t ) por: t v am
- 47. 1 2 1 2 m t t v - v a Donde v1 y v2 son las velocidades instantáneas en los puntos P1 y P2 respectivamente EJEMPLO Una partícula tiene un movimiento curvilíneo cuyas ecuaciones del movimiento está dada por: x = 4 t2 – 2 t y = 2 t2 – 5 donde “x” e “y” están en metro y “t” en segundo. Calcular el vector velocidad media entre los tiempos de 3 s y 1 s, además obtener el valor de dicha velocidad media SOLUCIÓN
- 48. ACELERACIÓN INSTANTÁNEA El vector aceleración instantánea de una partícula es igual a la primera derivada del vector velocidad instantánea con respecto al tiempo, es decir: t v Lim a 0 x ) t ( f v con t d v d a ) t d x d ( t d d a ) t ( f x con t d x d a 2 2 Es decir: la aceleración instantánea es igual a la segunda derivada del vector posición con respecto al tiempo La aceleración es un vector que tiene la dirección igual al cambio instantáneo de la velocidad
- 49. La aceleración siempre está apuntando hacia la parte cóncava de la trayectoria En la figura adjunta se observa la velocidad y la aceleración instantánea para los puntos P1 , P2 y P3 O Y X Trayectoria v1 v2 v3 a1 a2 a3 P1 P2 P3
- 50. EJEMPLO El movimiento de una partícula está definida por las siguientes ecuaciones: x = 2 t4 – 2 t y = 5 t3 v- 4 donde “x” e “y” están expresadas en metro y “t” en segundo. Calcular el valor de la aceleración instantánea para cualquier tiempo y para cuando t = 1 s SOLUCIÓN
- 51. ACELERACIÓN TANGENCIAL Y NORMAL. En la figura se tiene la trayectoria curvilínea de una partícula, donde se observa que en un punto tal como (A) la aceleración (a ) apunta hacia la parte cóncava de la trayectoria En ciertos fenómenos físicos como el movimiento circular es necesario descomponer la aceleración en forma tangencial a la trayectoria ( aT ) y en forma perpendicular a dicha tangente (aN ). vectorialmente se tiene N T a a a a = aTuT + aNuN Línea Tangente Línea Normal uN uT aT aN Y X Trayectoria A O a
- 52. Matemáticamente se demuestra que: t d v d a T T 2 T N v a = AQ es el radio de curvatura Línea Tangente Línea Normal uN uT aT aN Y X Trayectoria A O a Q El punto Q es el centro de curvatura La aceleración tangencial mide la variación del módulo de la velocidad. La aceleración normal mide la variación de la dirección de la velocidad El módulo de la aceleración en el punto A se determinar por: a2 = (aT )2 + (aN )2 ó a2 = (aX )2 + (aY )2
- 53. OBSERVACIONES En el movimiento circular se cumple: t d v d a T T R v a 2 N En el movimiento circular uniforme se cumple que 0 t d v d a T T R v a 2 N En el movimiento circular uniformemente variado, se cumple que constante t d v d a T T R v a 2 N
- 54. EJEMPLO El movimiento de una partícula se define por: r = ( t2 + 1 )i + ( t2 – 1)j donde “r” está en metro y “t” en segundo. Calcular el radio de curvatura de la trayectoria cuando t = 1 s SOLUCIÓN EJEMPLO Las coordenadas de un cuerpo en movimiento son: x = t2 y =( t–1)2. Hallar: a) La ecuación cartesiana de la trayectoria b) Representar la trayectoria c) ¿Cuándo se tiene la velocidad mínima? d) La aceleración tangencial y normal en cualquier instante y cuando t = 1 s SOLUCIÓN
- 55. MOVIMIENTO COMPUESTO Es aquel movimiento que resulta de la combinación de dos o más movimientos simples (MRU, MRUV). Si el movimiento compuesto se debe a dos MRU, la trayectoria es una línea recta en la dirección de la velocidad resultante Si el movimiento compuesto se debe a un MRU y a un MRUV ó dos MRUV, la trayectoria será una parábola. PRINCIPIO DE LA INDEPENDENCIA DE LOS MOVIMIENTOS Si una partícula tiene un movimiento compuesto, cada uno de los movimientos componentes se cumple como si los demás no existiesen d t vR t t vP
- 56. MOVIMIENTO PARABÓLICO Es un caso particular del movimiento compuesto, su trayectoria es una parábola. Proviene de dos movimientos simples que son el MRU y el MRUV. Si un cuerpo se lanza formando un determinado ángulo con la horizontal, éste describe una parábola como trayectoria; la componente vertical de la velocidad disminuye conforme el cuerpo sube y aumenta conforme el cuerpo cae, en cambio la componente horizontal permanece constante. vo vocos vocos vocos vocos vosen vosen Y X A O
- 57. VO: Velocidad inicial del cuerpo : ángulo de tiro x : alcance para un tiempo “t” OA : alcance máximo Vo cos : componente horizontal de la velocidad inicial, esta componente es constante Vo sen : componente vertical de la velocidad inicial, esta componente es variable OBSERVACIONES El alcance es suficientemente pequeño para despreciar la curvatura de la Tierra La altura máxima es suficientemente pequeño para despreciar la variación de la gravedad de la Tierra. Se desprecia la resistencia del aire
- 58. EJEMPLO Un bote a motor parte desde la orilla de un río con una velocidad constante de 40 m/s, perpendicular a él. Las aguas del río tienen una velocidad de 30 m/s y el ancho de éste es de 160 m. a) ¿Qué tiempo demora el bote en llegar a la otra orilla? b) ¿Qué espacio se desfasa? c) ¿Qué espacio recorre? SOLUCIÓN EJEMPLO Calcular la mínima velocidad (vo) que puede tener la persona para lograr pasar el obstáculo mostrado en la figura 5 m 37º vo
- 59. EJEMPLO Se dispara un proyectil con una velocidad inicial v = 25i + 25j m/s. Determine el ángulo que hacen los vectores velocidad y aceleración en t = 3 s. SOLUCIÓN
- 60. PRACTICA DIRIGIDA 1. Cuales son los valores de m y n para que el vector: k 3 j m - i n b y k j n 2 - i m a Sean perpendiculares, Dato a = 3 a . b = (m)(n) + (-2n)(-m) + (1)(3) = 3mn + 3 = 0 mn = -1 ....... (1) 9 = m2 + (-2n)2 + 12 m2 + 4 n2 = 8 ........ (2) SOLUCIÓN Sabiendo que a = 3, entonces: de (1) y (2) m2 + 4 ( -1 / m )2 = 8 m2 + 4 / m2 = 8 m4 + 4 = 8 m2 m4 - 8 m2 + 4 = 0 Resolviendo la ecuación cuadrática 3 2 4 2 3 4 8 2 48 8 16 - 64 8 m2 2 3 2 4 m 3 2 4 1 - m 1 - n
- 61. PROBLEMA 2 Obtener La componente del vector a en la dirección de el vector b que se muestra en la figura, en donde m es el punto medio del segmento BG. a = 700 y b = 50 (42,25)1/2 SOLUCIÓN CÁLCULO DEL VECTOR a: B G 2 m 3 6 b a A C O PUNTO A(2,0,3) PUNTO C(0,6,0) X Y Z a u a a u 700 a 9 36 4 k 3 j 6 - i 2 700 7 k 3 j 6 - i 2 700 k 300 j 600 - i 200 CÁLCULO DEL VECTOR a: PUNTO 0(0,0,0) PUNTO m(2;6;1,5) b u b b u 25 , 42 50 b 25 , 2 36 4 k 1,5 j 6 i 2 25 , 42 50 k 75 j 300 i 100
- 62. k 300 j 600 - i 200 a k 75 j 300 i 100 b b b a a compb 2 2 2 75 300 100 (75) (300) ) (-600)(300 (200)100) 5625 90000 10000 22500 180000 20000 424 324 137500 105225 137500 424 b b a a compb
- 63. PROBLEMA 3 La posición de una partícula sobre el eje x en función del tiempo está dado por: x = 16 t2 – t4 , donde “t” está en segundo y “x” en metro. Determinar: El valor máximo de la posición “x” para t 0 La aceleración media para el intervalo 1 s t 2 s SOLUCIÓN a) El máximo valor se consigue cuando 0 dt dx 32 t – 4 t3 = 0 2 2 t 2 2 t Para x = 16 (8) – (8) (8) x =64 m b) v = 32t – 4 t3 v1= 32(1) – (4) (1)3 = 28 m/s v1 = 28 m/s v2= 32(2) – (4) (2)3 = 32 m/s v2 = 32 m/s 2 1 2 1 2 m / 4 1 2 28 32 t t v v a s m
- 64. PROBLEMA 4 Una partícula se mueve en línea recta con una aceleración dada por a = 10 v1/2 donde v es la velocidad. Cuando t = 2 s, x = 10 m y v = 16 m/s. Determinar: a) La velocidad cuando t = 4 s b) La aceleración de la partícula cuando t = 8 s. SOLUCIÓN a) a = 10 v1/2 1/2 10v dt dv V-1/2 dv = 10 dt t 2 v 16 2 / 1 dt 10 dv v Realizando la integración y simplificando V = ( 5t – 6 )2 Para t = 4 s v4 = ( 5 x 4 – 6 )2 V4 = 196 m/s b) v = ( 5t – 6 )2 a = 10 (5t – 6) Para t = 8 s a8 = 10 ( 5 x 8 – 6) a8 = 340 m/s2
- 65. PROBLEMA 5 Un ciclista parte del reposo con una aceleración constante de 2,5 m/s2 y luego de recorrer una cierta distancia desacelera a razón de 5 m/s2, hasta que finalmente se detiene. ¿Qué distancia habrá recorrido el ciclista si estuvo en movimiento durante 1 min? SOLUCIÓN vA = 0 VB A B C a = 2,5 m/s2 a = - 5 m/s2 vC = 0 t1 t2 TRAMO AB vB = vA + a t1 = 0 + 2,5 t1 vB = 2,5 t1 TRAMO BC vC = vB – at2 0 = 2,5 t1 – 5 t2 t1 = 2 t2 Pero el tiempo total es de 60 s: t1 + t2 = 60 2t2 + t2 = 60 t2 = 20 s t1 = 40 s También: eT = eAB + eBC 2 C B 1 B A T t 2 v v t 2 v v e 20 2 0 40 5 , 2 40 2 40 5 , 2 0 e T x x eT = 2 000 + 1000 eT = 3 000 m