
Recomendados
Más contenido relacionado
Similar a Respuesta frecuencial.pdf
Similar a Respuesta frecuencial.pdf (20)
Último
Último (20)
Respuesta frecuencial.pdf
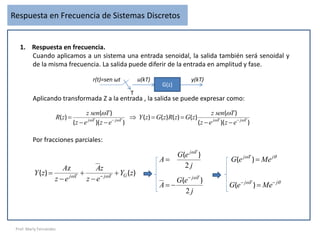
- 1. Respuesta en Frecuencia de Sistemas Discretos 1. Respuesta en frecuencia. Cuando aplicamos a un sistema una entrada senoidal, la salida también será senoidal y de la misma frecuencia. La salida puede diferir de la entrada en amplitud y fase. Aplicando transformada Z a la entrada , la salida se puede expresar como: Por fracciones parciales: ) )( ( ) ( ) ( ) ( ) ( ) ( ) )( ( ) ( ) ( T j T j T j T j e z e z T sen z z G z R z G z Y e z e z T sen z z R u(kT) T G(z) y(kT) r(t)=sen ωt ) ( ) ( z Y e z z A e z A z Y G T j T j z j T j T j j T j T j Me e G j e G A Me e G j e G A ) ( ) ( ) ( ) ( 2 2 Prof. Marly Fernández
- 2. Respuesta en Frecuencia de Sistemas Discretos 1. Respuesta en frecuencia. Reescribiendo Y(z): Antitransformando: donde: Entre los métodos usados en sistemas de control para el análisis de la respuesta en frecuencia, se tienen: a. Diagrama de Nyquist: Representa el módulo y el ángulo en cordenadas polares cuando ω varía de 0 a ∞. b. Diagrama de Nichols: Es un gráfico del módulo en decibeles en función del ángulo en coordenadas rectangulares cuando ω varía de 0 a ∞. c. Diagramas de Bode. ) ( z z 2 ) ( z Y e z e e z e j M z Y G T j j T j j ) ( 2 ) ( kT sen M e e e e j M kT y kT j j kT j j SS ) ( ) ( ) ( ) ( T j T j e G e G M M Prof. Marly Fernández
- 3. Respuesta en Frecuencia de Sistemas Discretos 2. Diagramas de Bode. Se trata de la representación frecuencial mediante dos curvas en función de la frecuencia,ω, en escala logarítmica. La primera es la relación de módulos, en decibelios y la segunda el ángulo de fase, en grados. 2.1 Procedimiento para trazar los diagramas de Bode. i. Determinar la FTP de lazo abierto del sistema. ii. Realizar la transformación bilineal: iii. Sustituir w por jωw y descomponer en factores. iv. Realizar el trazado de cada factor y obtener los diagramas definitivos. v. Determinar MF, MG, ωcf, ωcg vi. Transformar las frecuencias al plano S: vii. Analizar la estabilidad del sistema. ) ( ) ( / / w GH z GH T w T w z 2 1 2 1 Prof. Marly Fernández ) ( 2 2 1 w T tg T
- 4. Respuesta en Frecuencia de Sistemas Discretos 2.2 Tabla de diagramas aproximados por factor. A j G ) ( k j A j G ) ( k j A j G ) ( ) ( Prof. Marly Fernández
- 5. Respuesta en Frecuencia de Sistemas Discretos 2.2 Tabla de diagramas aproximados por factor (continuación). ) ( ) ( 1 j j G ) ( ) ( 1 j j G 1 1 j j G ) ( 1 1 j j G ) ( Prof. Marly Fernández
- 6. Respuesta en Frecuencia de Sistemas Discretos 2.2 Tabla de diagramas aproximados por factor (continuación). 1 2 2 2 j j j G ) ( 1 2 2 2 j j j G ) ( 1 2 1 2 2 j j j G ) ( 1 2 1 2 2 j j j G ) ( Prof. Marly Fernández
- 7. Respuesta en Frecuencia de Sistemas Discretos 2.3 Definiciones para el análisis de estabilidad del sistema usando los diagramas de Bode. a. Frecuencia de cruce de ganancia: frecuencia a la cual el módulo de FTP de lazo abierto es igual a uno, es decir, frecuencia donde el diagrama de módulo cruce 0dB. b. Frecuencia de cruce de fase: frecuencia a la cual el ángulo de FTP de lazo abierto es igual -180. c. Margen de fase: es la cantidad de retardo de fase adicional necesaria a la frecuencia de cruce de ganancia para que el sistema quede al borde de la inestabilidad. d. Margen de ganancia: es la cantidad de ganacia adicional necesaria a la frecuencia de cruce de fase para que el sistema quede al borde de la inestabilidad. Prof. Marly Fernández
- 8. Respuesta en Frecuencia de Sistemas Discretos Ejemplo: Prof. Marly Fernández Realizar los gráficos aproximados de Bode. E*(s) T=1 s Y(s) E(s) R(s) _ + Gp(s) s Ts e 1 G(s) 𝐺 𝑠 = 1 𝑠(𝑠 + 1) 𝐺 𝑧 = 0,368𝑧 + 0,264 𝑧2 − 1,38𝑧 + 0,38 Paso1: Calcular 𝐺 𝑧 Paso2: Realizar transformación bilineal 𝑧 = 1 + 0,5𝑤 1 − 0,5𝑤 𝐺 𝑤 = 0,0381 𝑤 − 2 𝑤 + 12,14 𝑤 𝑤 + 0,924 Paso3: 𝑤 ⟶ 𝑗𝜔𝑤 𝐺 𝑗𝜔𝑤 = 0,0381 𝑗𝜔𝑤 − 2 𝑗𝜔𝑤 + 12,14 𝑗𝜔𝑤 𝑗𝜔𝑤 + 0,924 𝐺 𝑗𝜔𝑤 = 0,0381 𝑗 𝜔𝑤 2 − 1 𝑗 𝜔𝑤 12,14 + 1 𝑗𝜔𝑤 𝑗 𝜔𝑤 0,924 + 1
- 9. Respuesta en Frecuencia de Sistemas Discretos Prof. Marly Fernández Paso4: Construir los gráficos de cada factor y sumarlos para obtener los gráficos de la función completa Paso5: Calcular MF, MG, ωcf, ωcg y transformar las frecuencias ) ( 2 2 1 w T tg T
- 10. Respuesta en Frecuencia de Sistemas Discretos Prof. Marly Fernández 10 -1 10 0 10 1 10 2 -60 -50 -40 -30 -20 -10 0 10 20 System: mp Peak gain (dB): 10.1 At frequency (rad/sec): 3.08 System: mp Frequency (rad/sec): 4.84 Magnitude (dB): -3.03 Magnitude (dB) Bode Diagram Frequency (rad/sec) Análisis de la respuesta en frecuencia a Lazo Cerrado. 4. Diagramas de Bode Lazo Cerrado.
- 11. Respuesta en Frecuencia de Sistemas Discretos Prof. Marly Fernández 4. Diagramas de Bode Lazo Cerrado. a. Pico de resonancia Mr: es el máximo valor de |M(jω)|. b. Frecuencia de resonancia ωr: es la frecuencia en la cual el pico de resonancia ocurre. c. Frecuencia de corte ωc: es la frecuencia en la cual |M(jω)| cae a 0.707 (-3db) de su valor de frecuencia cero. d. Ancho de banda AB: es el rango de frecuencia que va desde 0 hasta la frecuencia de corte. e. Razón de corte: es la pendiente de la curva de magnitud logarítmica cercana a la frecuencia de corte. Definiciones para el análisis del sistema usando los diagramas de Bode a lazo cerrado: