
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (19)
Destacado
Destacado (20)
Similar a Clase intro mec_cinem_1_y_2
Similar a Clase intro mec_cinem_1_y_2 (20)
Clase intro mec_cinem_1_y_2
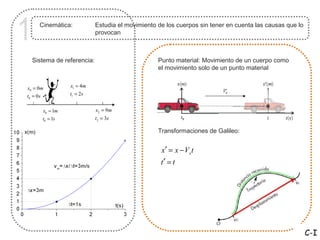
- 1. 1 Cinemática: Estudia el movimiento de los cuerpos sin tener en cuenta las causas que lo provocan Sistema de referencia: Punto material: Movimiento de un cuerpo como el movimiento solo de un punto material x0 = 0m x1 = 4m t0 = 0 s t1 = 2s x0 = 1m x2 = 9m t0 = 1s t2 = 3s Transformaciones de Galileo: x ′ = x − Vx t t′ = t C-I
- 2. 2 Cinemática: t Derivada e integral Interpretación gráfica x(t ) = x0 + ∫ v (t )dt t0 x(t + ∆t ) − x(t ) dx v(t ) = lim = ∆t →0 ∆t dt dx vP = = tan α P dt v P > vM αM αP C-I
- 3. 3 Cinemática: Velocidad constante, aceleración constante y variable Aceleración variable t x(t ) = x0 + ∫ v(t )dt t0 t Unidades v(t ) = v0 + ∫ a (t )dt t0 x[m] v[m / s] a[m / s 2 ] C-I
- 4. 4 Cinemática: Cinemática en 3D. Vectores posición, velocidad y aceleración. Cinemática en 1D. Cinemática en 3D. r r 2r dx dv d x 2 r dr r dv d r v= a= = 2 v= a= = 2 dt dt dt dt dt dt t t r r r x(t ) = x0 + ∫ v(t )dt r (t ) = r0 + ∫ v (t )dt t0 t0 t t r r r v(t ) = v0 + ∫ a (t )dt v (t ) = v0 + ∫ a (t )dt t0 t0 Unidades r r r r [m] v [m / s ] a[m / s 2 ] C-II
- 5. 5 Cinemática: Vectores r r r A = Ax i + Ay j = ( Ax ; Ay ) r r r r Suma de vectores A + B = ( Ax + Bx )i + ( Ay + B y ) j r r A + B = ( Ax + Bx ; Ay + B y ) r r r r Bx Producto escalar de vectores A ×B = A B cos θ = ( Ax ; Ay ) × ÷ = Ax Bx + Ay By By r r A⋅ B r Proyección de A en B r = A cos θ B r r Producto vectorial r r r a ×b r r i j k r r r r r a × b = ax a y az a × b = a b sin α Módulo → b bx by bz r r r r r r r a ×b a × b = i (a y bz − az by ) − j (a xbz − a z bx ) + k (a xby − a ybx ) r a C-II
- 6. 6 Cinemática: Vector Posición r 3D r 2D y0 r r y0 j= r y0 r x0r x0 i = r x0 r r r r r r r r (t ) = x(t )i + y (t ) j + z (t ) k r0 = x0 i + y0 j = ( x0 ; y0 ) r r r = x0 + y0 2 2 módulo r (t ) = ( x(t ); y (t ); z (t )) y0 tan θ = x0 C-II
- 7. 7 Cinemática: velocidad Vectores velocidad y aceleración aceleración r r r r r r r dr (t ) r dv (t ) d 2 r (t ) r r r v (t ) = = vx i + v y j + vz k a (t ) = = = ax i + a y j + az k dt dt dt 2 r dx(t ) r dy (t ) r dz (t ) r r dvx (t ) r dv y (t ) r dvz (t ) r v (t ) = i+ j+ k a (t ) = i+ j+ k dt dt dt dt dt dt r d 2 x(t ) r d 2 y (t ) r d 2 z (t ) r r a (t ) = i+ j+ k v (t ) = v(t ) = vx + v y + vz2 2 2 dt 2 dt 2 dt 2 r a (t ) = a(t ) = ax + a y + az2 2 2 C-II
- 8. 8 Cinemática: Componentes tangencial y normal r rr r v = v et + 0en r r r r dv d (vet ) dv r det a= = = et + v dt dt dt dt r r r a = at et + an en dv at = dt v2 v2 ρ an = an = ρ ρ C-II
- 9. 9 Cinemática: radio de curvatura ρ ( m) Algoritmo r r v r 1 → et = Calcular el vector unitario en la dirección tangencial et v r r r r 2 → at = a ×et Calcular la proyección de a en et r2 r2 3 → a = at2 + an 2 Determinar a = ax + a y 2 2 Calcular an v2 4 → an = Despejar ρ ρ C-II
- 10. 9 Cinemática: radio de curvatura ρ ( m) Algoritmo r r v r 1 → et = Calcular el vector unitario en la dirección tangencial et v r r r r 2 → at = a ×et Calcular la proyección de a en et r2 r2 3 → a = at2 + an 2 Determinar a = ax + a y 2 2 Calcular an v2 4 → an = Despejar ρ ρ C-II