Controlador integrativo
•
0 recomendaciones•1,152 vistas

El controlador integral proporciona una salida proporcional a la integral del error acumulado para eliminar el error residual. Aunque su respuesta inicial es lenta, anula el error a largo plazo. Un aumento en la constante integral Ki mejora la estabilidad pero ralentiza la respuesta, mientras que una disminución de Ki hace que el controlador se comporte más como un controlador proporcional.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Controlador integrativo
Similar a Controlador integrativo (20)
Último
Último (20)
Controlador integrativo
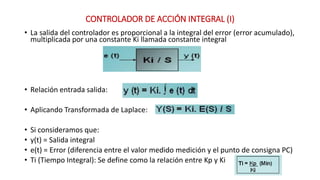
- 1. CONTROLADOR DE ACCIÓN INTEGRAL (I) • La salida del controlador es proporcional a la integral del error (error acumulado), multiplicada por una constante Ki llamada constante integral • Relación entrada salida: • Aplicando Transformada de Laplace: • Si consideramos que: • y(t) = Salida integral • e(t) = Error (diferencia entre el valor medido medición y el punto de consigna PC) • Ti (Tiempo Integral): Se define como la relación entre Kp y Ki
- 2. • La respuesta temporal de un regulador integral es: • La velocidad de respuesta del sistema de control dependerá del valor de Ki que es la pendiente de la rampa de acción integral. • El inconveniente del controlador integral es que la respuesta inicial es muy lenta, y, el controlador no empieza a ser efectivo hasta haber transcurrido un cierto tiempo. En cambio anula el error remanente que presenta el controlador proporcional.
- 3. Características de los controladores P-I e I • Al evaluar las características para un sistema de segundo orden con un Controlador P-I e I para diferentes valores de Ki y un cambio escalón de 25% • Se aprecia lo siguiente: • Se eliminará el error el cual tiende a ser cero. • Genera oscilaciones en la respuesta del proceso. • El aumento de Ki(Disminución de Ti) tiende a estabilizar las oscilaciones. • El aumento reiterado de Ki hace muy lenta la respuesta del sistema. • La disminución reiterada de Ti hace que el controlador tienda a P.
- 5. • El termino integral “I”, genera una corrección proporcional a la integral del error. Esto nos asegura que si aplicamos un esfuerzo de control suficiente, el error de seguimiento se reduce a cero. • El control integrativo afina la señal, cuando el error en estado estable está oscilando. • Una desventaja de este tipo de controlador es que entra en conflicto con el control derivativo.
- 6. PROGRAMA EN MATLAB • m=2; %MASA DEL SISTEMA • b=10; %COEFICIENTE DE FRICCIÓN VISCOSA DEL AMORTIGUADOR • k=25; %COEFICIENTE ELÁSTICO DEL RESORTE • H=tf(1,[m b k]); %FUNCIÓN DE TRANSFERENCIA • kp=200; %GANANCIA PROPORCIONAL • HLC1=feedback(kp*H,1); %HLC= SISTEMA DE LAZO CERRADO • • %APLICANDO UN CONTROLADOR INTEGRATIVO • ki=10; %GANACIA INTEGRAL • HLCI=feedback(tf([ki kp],1)*H,1); • figure(1) • step(H,'m',HLC1,'r',HLCI,'b') • title('RESPUESTA DE UN CONTROL INTEGRATIVO EN EL DOMINIO DEL TIEMPO') • grid minor • figure(2) • bode(HLC1,'r',HLCI,'b') • title('RESPUESTA DE UN CONTROL INTEGRATIVO EN EL DOMINIO DE LA FRECUENCIA') • grid minor
- 7. RESPUESTA EN EL DOMINIO DEL TIEMPO
- 8. RESPUESTA EN EL DOMINIO DE LA FRECUENCIA