Ejercicios Cronogramas Programación
•
0 recomendaciones•42 vistas

El documento presenta una serie de ejercicios sobre cronogramas de programación de PLC. Se pide dibujar la evolución temporal de las salidas en función de las entradas para diferentes casos en cada ejercicio y responder preguntas específicas sobre los valores de las salidas y marcas a determinados tiempos.

Recomendados
Más contenido relacionado
Similar a Ejercicios Cronogramas Programación
Similar a Ejercicios Cronogramas Programación (20)
Más de SANTIAGO PABLO ALBERTO
Más de SANTIAGO PABLO ALBERTO (20)
Último
Último (20)
Ejercicios Cronogramas Programación
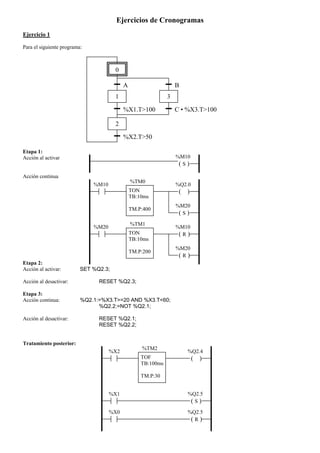
- 1. Ejercicios de Cronogramas Ejercicio 1 Para el siguiente programa: Etapa 1: Acción al activar Acción continua Etapa 2: Acción al activar: SET %Q2.3; Acción al desactivar: RESET %Q2.3; Etapa 3: Acción continua: %Q2.1:=%X3.T>=20 AND %X3.T<60; %Q2.2:=NOT %Q2.1; Acción al desactivar: RESET %Q2.1; RESET %Q2.2; Tratamiento posterior: 0 1 2 3 A B %X1.T>100 C • %X3.T>100 %X2.T>50 %M10 ( S ) %Q2.0 ( ) %M10 TON TB:10ms TM.P:400 %TM0 %M20 ( S ) %M10 ( R ) %M20 TON TB:10ms TM.P:200 %TM1 %M20 ( R ) %Q2.4 ( ) %X2 TOF TB:100ms TM.P:30 %TM2 %Q2.5 ( S ) %X1 %Q2.5 ( R ) %X0
- 2. Dibujar la evolución temporal de las salidas en función de las entradas para los siguientes casos: Caso 1: Caso 2: Caso 3: t(s) 1 2 3 4 5 6 7 8 A B C t(s) 1 2 3 4 5 6 7 8 9 t(s)1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 A B C A B C
- 3. Ejercicio 2 Dado el siguiente programa: Etapa 1 Acción al activar: SET %Q2.4; Etapa 2 Acción al desactivar: RESET %Q2.4; Etapa 3 Acción al activar: SET %Q2.3; SET %M0; Acción continua: %Q2.1:=%M0 AND %X3.T<20; Acción al desactivar: RESET %Q2.1; %MW0:=%MW0+2; Etapa 4 Acción al activar: IF %MW0 > 1 THEN SET %Q2.0; END_IF; %MW0:=0; Acción al desactivar: RESET %Q2.0; RESET %Q2.3; RESET %M0; Etapa 6 Acción activación: IF %M0 THEN SET %Q2.0; ELSE SET %Q2.1; END_IF; Acción al desactivar: RESET %Q2.0; RESET %Q2.1; Dibujar la evolución temporal de la salidas en función de las entradas para los siguientes casos: Caso 1: Caso 2: 0 1 3 4 5 6 2 A B C %X1.T>40 %X4.T>40 %X5.T>20 D %X0 %M0 ( R ) %Q2.2 ( ) %X5 TON TB:10ms TM.P:100 %TM0 %MW0:=0 %Q2.3 ( R ) Tratamiento posterior: A B C D t(s)1 2 3 4 5 6 7 8 9 10 11 12 A B C D t(s)1 2 3 4 5 6 7 8 9 10 11 12
- 4. %Q2.1 ( ) %Q2.1 ( ) %Q2.2 ( ) %Q2.2 ( ) Ejercicio 3 Dado el siguiente programa: Etapa 2 Acción continua: Etapa 3 Acción continua: Etapa 4 Acción continua: Etapa 5 Acción continua: Etapa 10 Acción continua: ( ) TP-%TM1 TB:1s QIN TMP:4 MODIF:Y Q %M1 TON-%TM2 TB:1s QIN TMP:2 MODIF:Y Q ( ) %M2%M1 %M1 %M2 ( )S %M3
- 5. Etapa 11 Acción al activar: ( )S %M5 Acción continua: TON-%TM3 TB:100ms QIN TMP:20 MODIF:Y Q ( )S %M6%M5 ( )R %M6 TON-%TM4 TB:10ms QIN TMP:300 MODIF:Y Q ( )S %M5%M6 ( )R %M5 %C1 CU MODIF:Y F R E DCP:4 ( )S %M7 %M5 (R ) %M6 Tratamiento posterior: ( ) %Q2.4%M2 ( ) %Q2.5%M5 ( ) %Q2.3%M1 Notas: - las señales %I1.x, son las entradas, las %Mx, bits de memoria y %Q2.x salidas - la base de tiempos de la evolución de entradas es de 1s. - en la etapa cero se resetean todas las salidas y las marcas de memoria - detallar los tiempos de activación / desactivación de las salidas Se pide: Dibujar la evolución temporal de las salidas en función de las entradas para los siguientes casos: %I1.1 %I1.2 Caso 1 %I1.3 Caso 2 %I1.1 %I1.2 %I1.3
- 6. Ejercicio 4 Dado el siguiente programa: Etapa 0 Etapa 5 Acción al activar: %MW0=0; Acción al activar: SET %M1; RESET %M0; Acción continua: Acción continua: Etapa 1 Etapa 6 Acción al activar: %MW0=%MW0+1; Acción al activar: RESET %M0; SET %M0; RESET %M1; Acción continua:
- 7. Etapa 3 Etapa 7 Acción al activar: SET %Q2.2; Acción continua: Acción al desactivar: RESET %Q2.2; Etapa 4 Acción continua: Tratamiento Posterior Dibujar la evolución temporal de las salidas en función de las entradas para los siguientes casos: Caso 1: Caso2:
- 8. Ejercicio 5 Dado el siguiente programa: Etapa 1 Acción al activar: SET %Q2.0; %MW0:=1; Etapa 2 Acción al activar: SET %M0; Acción al desactivar: RESET %Q2.0; RESET %M0; Etapa 3 Acción al activar: SET % Q2.1; Acción continua: %Q2.2:=%M0; Acción al desactivar: %MW0:=%MW0+2; Etapa 4 Acción al activar: IF %MW0 > 1 THEN SET %Q2.0; END_IF; Acción al desactivar: RESET %Q2.0; RESET %Q2.4; Dibujar la evolución temporal de las salidas en función de las entradas para los siguientes casos: Caso 1: Caso 2: 0 1 3 4 5 6 2 A AND % X0.T>30 B C %X1.T>40 %X4.T>10 %X3.T>20 D %X0 %M0 (R ) %Q2.4 ( ) %X6 TON TB:20ms TM.P:100 %TM0 %MW0:=0 %Q2.3 (S ) Tratamiento posterior: A B C D t(s)1 2 3 4 5 6 7 8 9 10 11 12 A B C D t(s)1 2 3 4 5 6 7 8 9 10 11 12
- 9. Ejercicio 6 Dado el siguiente programa: Tratamiento Preliminar: Etapa 1 Acción al activar: SET %Q2.2; %MW0:= 1; Acción al desactivar: RESET %Q2.2; SET %Q2.0; Etapa 2 Acción continua: %Q2.1:= %M0 AND %X2.T<20; %Q2.2:= NOT %Q2.1; Acción al desactivar: RESET %Q2.1; RESET %Q2.2; Etapa 3 Acción continua: %Q2.3:= %M1 AND %X3.T>50; SET %Q2.0; Acción al desactivar: RESET %Q2.3; MW0:= MW0+2; Etapa 4 Acción al activar: IF %MW0>3 THEN SET %Q2.4; SET %M2; ELSE RESET %Q2.0; END_IF; Acción al desactivar: RESET %Q2.4; RESET %M0; Tratamiento Posterior: Dibujar la evolución temporal de las salidas en función de las entradas en los siguientes casos:
- 10. Caso 1 Caso 2
- 11. Ejercicio 7 Dado un automatismo controlado según el programa detallado a continuación: Transición 0 1 B; Transición 1 2 A; Transición 2 7 (%X2.T>10) (%MW1>0); Transición 2 8 (%X2.T>10) (%MW1=0); Transición 1 3,4 %X1.T> 20; Transición 4 5 %X4.T> 10; Transición 3,5 6 (%X3.T> 20) C; Transición 6 7 (%X6.T> 10) (%MW1>0); Transición 6 8 (%X6.T> 10) (%MW1=0); Transición 7 1 (%X7.T> 30); Transición 8 0 (%X8.T> 20) (%MW2=3); Transición 8 1 (%X8.T> 20) (%MW2<3); Tratamiento preliminar: IF RE %M100 OR RE %M80 THEN %MW1:= %MW2-1 ; END_IF; IF FE %X1 THEN RESET %Q2.4 ; END_IF; Etapa 0 Acción al activar %MW2:=2; SET %Q2.0; Acción al desactivar RESET %Q2.0;
- 12. Etapa 1: Acción continua: %Q2.4 := (%X1.T <= 40); Etapa 3 Acción continua: %Q2.2 := NOT ((%X3.T <= 10) OR (X3.T>=50)); Etapa 4 Acción al activar SET %Q2.3; Acción al desactivar RESET %Q2.3; Etapa 6 Acción continua: IF %X6.T >=9 THEN SET %M100 ; END_IF; Acción al desactivar RESET %Q2.1; Tratamiento posterior Etapa 7 Acción al activar SET %Q2.1; SET %Q2.2; Acción al desactivar RESET %Q2.2; %MW2:= %MW2-1; Etapa 8 Acción al activar SET %Q2.3; SET %Q2.0; SET %M5; Acción continua: IF RE%M5 THEN %MW2:= %MW1+3 ; END_IF; Acción al desactivar RESET %Q2.3;
- 13. Se pide: Dibujar la evolución temporal de las salidas en los siguientes casos: t(s) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 A B C D %Q2.1 %Q2.0 %Q2.2 %Q2.3 %Q2.4
- 14. Ejercicio 8 Dado el siguiente programa: Etapa 1 Acción al activar: SET %Q2.4; Acción al desactivar: RESET %Q2.2; Etapa 2 Acción al activar: SET %M21; Acción continua: %Q2.5:= %M10; Acción al desactivar: RESET %M21; Etapa 3 Acción al activar: SET %Q2.1; SET %M31; Acción al desactivar: RESET %Q2.1; RESET %M31; Etapa 4 Acción al activar: SET %Q2.3; Acción al desactivar: RESET %Q2.3; Etapa 5 Acción al activar: SET %M15; Acción continua: %Q2.2:= %X5.T<20; Acción al desactivar: RESET %M15; Tratamiento Posterior: Etapa 6 Acción al activar: SET %M16; SET %M10; Acción continua: %Q2.3:= %X6.T<30; Acción al desactivar: RESET %M16; Etapa 7 Acción al activar: %MW0:=20; Acción al desactivar: %MW10:=0; Etapa 8 Acción continua: %Q2.2:= %X8.T>10 AND %X8.T<40; Etapa 9 Acción continua: %Q2.1:= %X9.T>20 AND %M10; Acción al desactivar: RESET %Q2.4; Asignatura:
- 15. a) Dibujar la evolución temporal de las salidas en función de las entradas C1, C2; y, C3: b) ¿Qué salida(s) se activa(n) a los 10 segundos del cronograma? c) ¿Qué valor contiene %MW10 a los 15 segundos del cronograma?