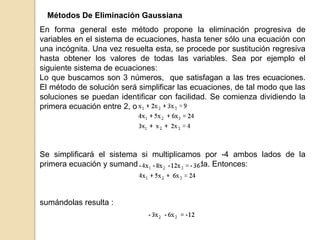
Este documento presenta varios métodos para resolver sistemas de ecuaciones lineales, incluyendo el método de eliminación de Gauss, descomposición LU, factorización de Cholesky, y métodos iterativos como Gauss-Seidel y Jacobi. Explica los pasos matemáticos involucrados en cada método y cuándo cada uno es más adecuado para ciertos tipos de sistemas.




![Factorización De Cholesky
Una matriz simétrica es aquella donde Aij = Aji para toda i y j, En otras
palabras, [A] =[A] T. Tales sistemas ocurren comúnmente en problemas
de ambos contextos: el matemático y el de ingeniería. Ellos ofrecen
ventajas computacionales ya que sólo se necesita la mitad de
almacenamiento y, en la mayoría de los casos, sólo se requiere la
mitad del tiempo de cálculo para su solución. Al contrario de la
Descomposición LU, no requiere de pivoteo. El método de
Factorización de Cholesky se basa en demostrar que si una matriz A
es simétrica y definida positiva en lugar de factorizarse como
LU, puede ser factorizada como el producto de una matriz triangular
inferior y la traspuesta de la matriz triangular inferior, es decir los
factores triangulares resultantes son la traspuesta de cada uno.
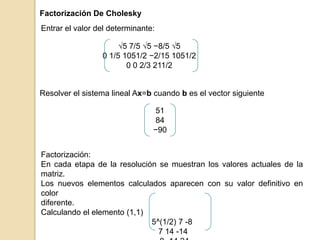
Ejemplo:
Obtener la factorización de Cholesky de la siguiente matriz (entrar sólo
los elementos de U, la triangular superior)
5 7 −8
7 14 −14
−8 −14 24](https://image.slidesharecdn.com/analisisnumerico-130628194125-phpapp01/85/Solucion-de-Sistemas-de-Ecuaciones-Lineales-Analisis-numerico-9-320.jpg)














![Solucionario ecuaciones diferenciales dennis zill[7a edicion]](https://cdn.slidesharecdn.com/ss_thumbnails/solucionarioecuacionesdiferencialesdenniszill7aedicion-120713235939-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)































![Factorizacion lu[1]](https://cdn.slidesharecdn.com/ss_thumbnails/factorizacionlu1-100727204723-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)














































