Descargar para leer sin conexión
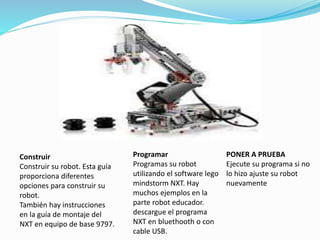


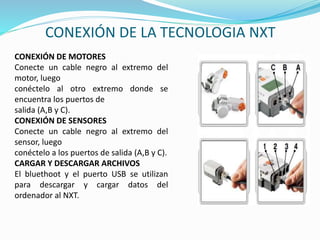


Este documento describe cómo construir y programar un robot utilizando piezas LEGO Mindstorms NXT. Explica cómo conectar sensores como el sensor táctil, acústico, fotosensible y ultrasónico, así como motores y lámparas al ladrillo NXT. También proporciona instrucciones para programar el robot utilizando el software LEGO Mindstorms NXT y poner a prueba el robot una vez programado.
































































