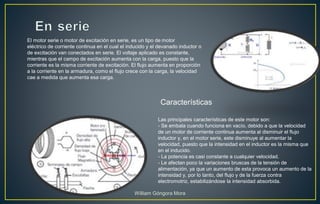
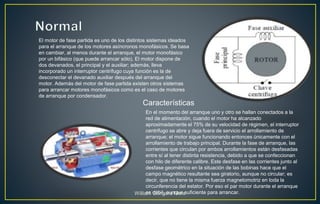
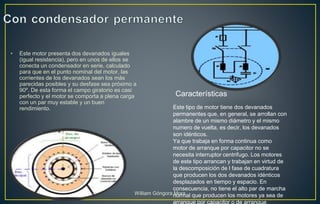
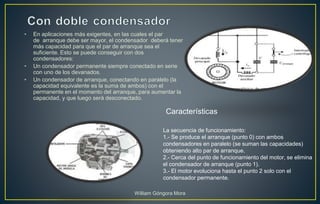
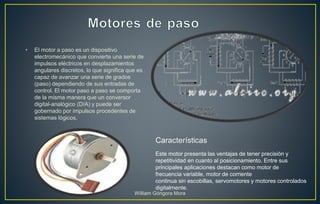
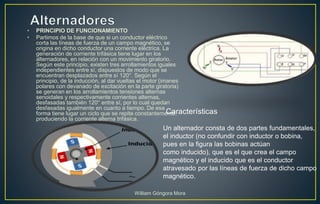
El documento describe diferentes tipos de motores eléctricos, incluyendo motores de corriente continua serie, compound y shunt, así como motores monofásicos de fase partida y arranque por capacitor. También discute motores de excitación independiente y motores universales.