Descargado 26 veces

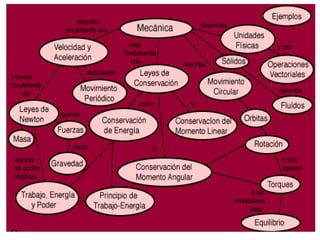





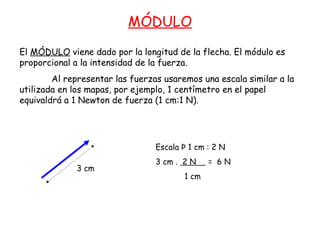


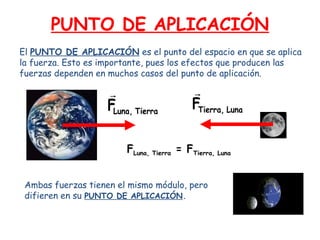





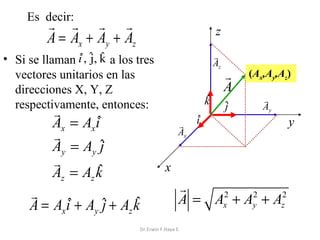
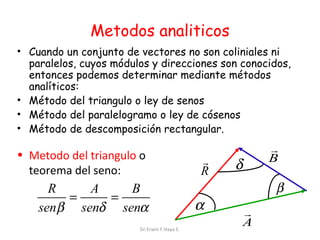
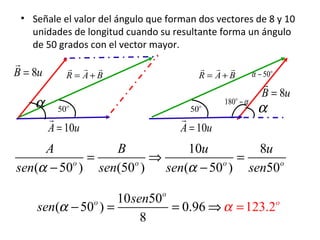



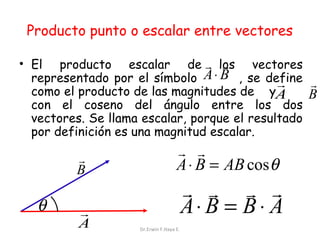
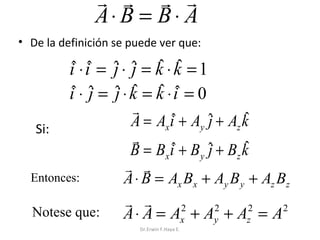





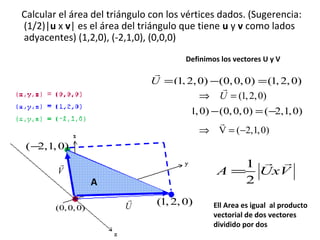



El documento describe las características de las cantidades físicas escalares y vectoriales. Las cantidades escalares se definen por un número real y una unidad, mientras que las cantidades vectoriales se definen por magnitud, dirección y sentido. Se explican conceptos como módulo, dirección, sentido y punto de aplicación para representar vectores. También se describen métodos para determinar la resultante de vectores concurrentes y no colineales.































































