Descargado 129 veces









![Método del Paralelogramo
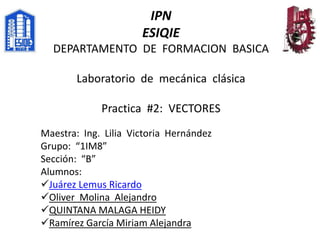
• El método consiste en desplazar el vector B al final del
vector A y unir el origen con el final del vector B (el
método es similar para la resta de vectores [A -B], sólo
debe cambiarse el sentido del vector B a -B y sumar
este último al vector A.](https://image.slidesharecdn.com/expovectores-120116214608-phpapp02/85/Vectores-11-320.jpg)







Este documento describe conceptos básicos sobre vectores, incluyendo sus diferentes tipos, representaciones y operaciones. Explica que los vectores son cantidades que requieren módulo, dirección y sentido, a diferencia de los escalares. También describe cómo representar vectores gráficamente, analíticamente y mediante componentes, así como cómo sumar, restar y multiplicar vectores. Finalmente, presenta fórmulas para calcular cosenos directores y la distancia entre dos puntos en el espacio.































![Vectores en una y dos dimensiones nivel oa [modo de compatibilidad]](https://cdn.slidesharecdn.com/ss_thumbnails/vectoresenunaydosdimensionesniveloamododecompatibilidad-110914073211-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)












































