Descargado 28 veces






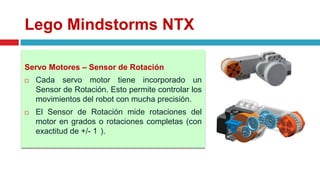
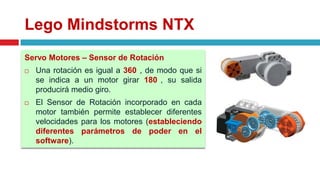
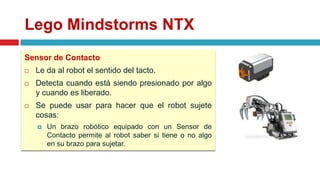
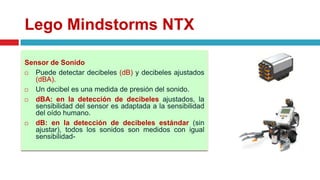
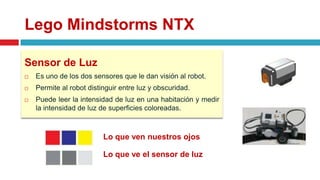
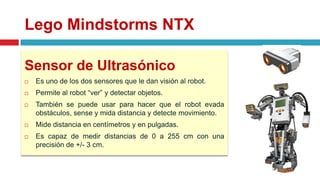










Este documento proporciona una introducción a la programación de robots Lego Mindstorms NXT usando el lenguaje de programación Java. Explica brevemente la historia de Lego y sus productos Mindstorms, describe los componentes del bloque NXT como motores, sensores y firmware, y presenta el software y la interfaz de programación de aplicaciones necesarios para programar el NXT en Java, incluido el framework LeJos NXJ.










































































































