Descargar como PDF, PPTX
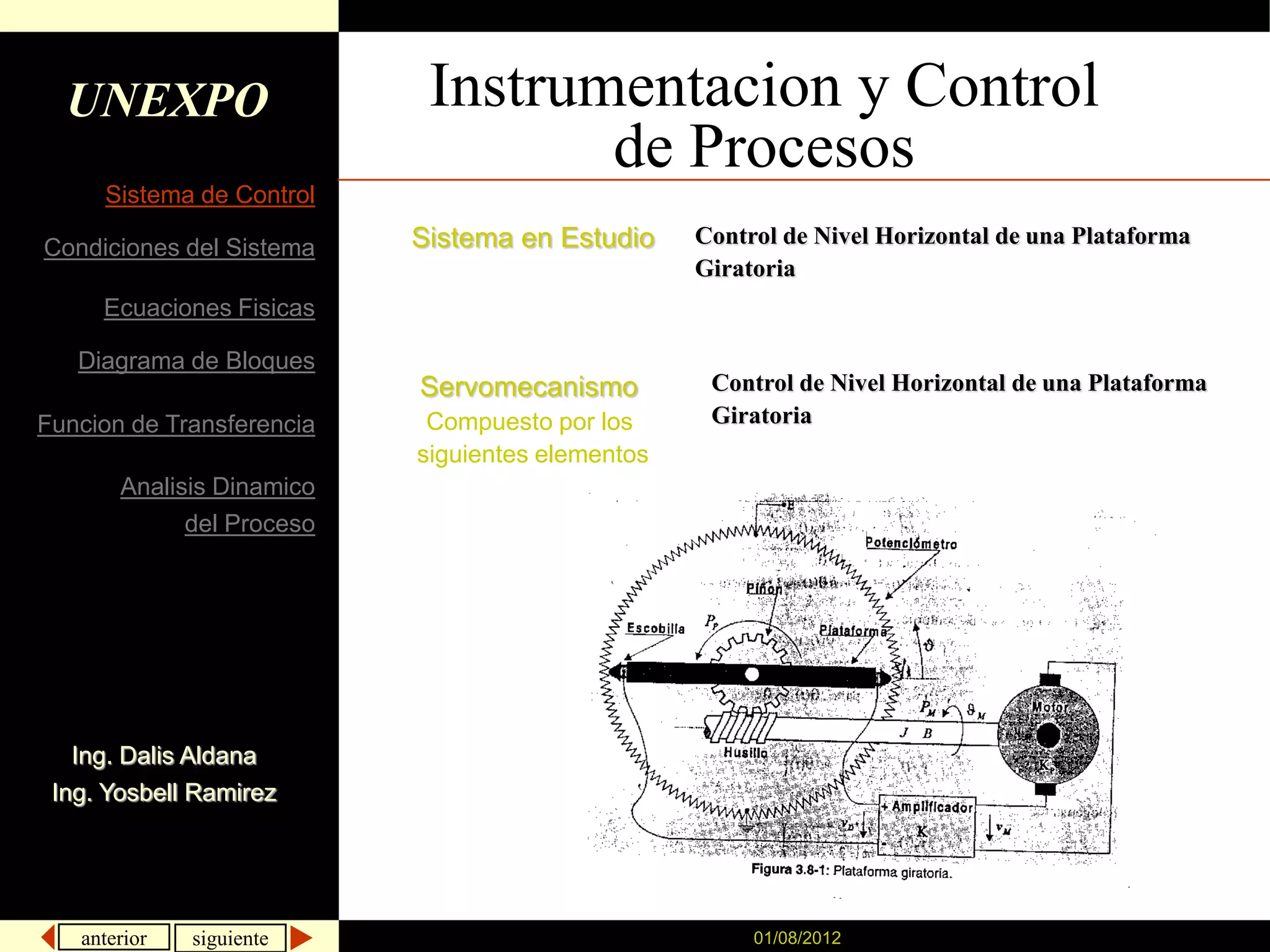
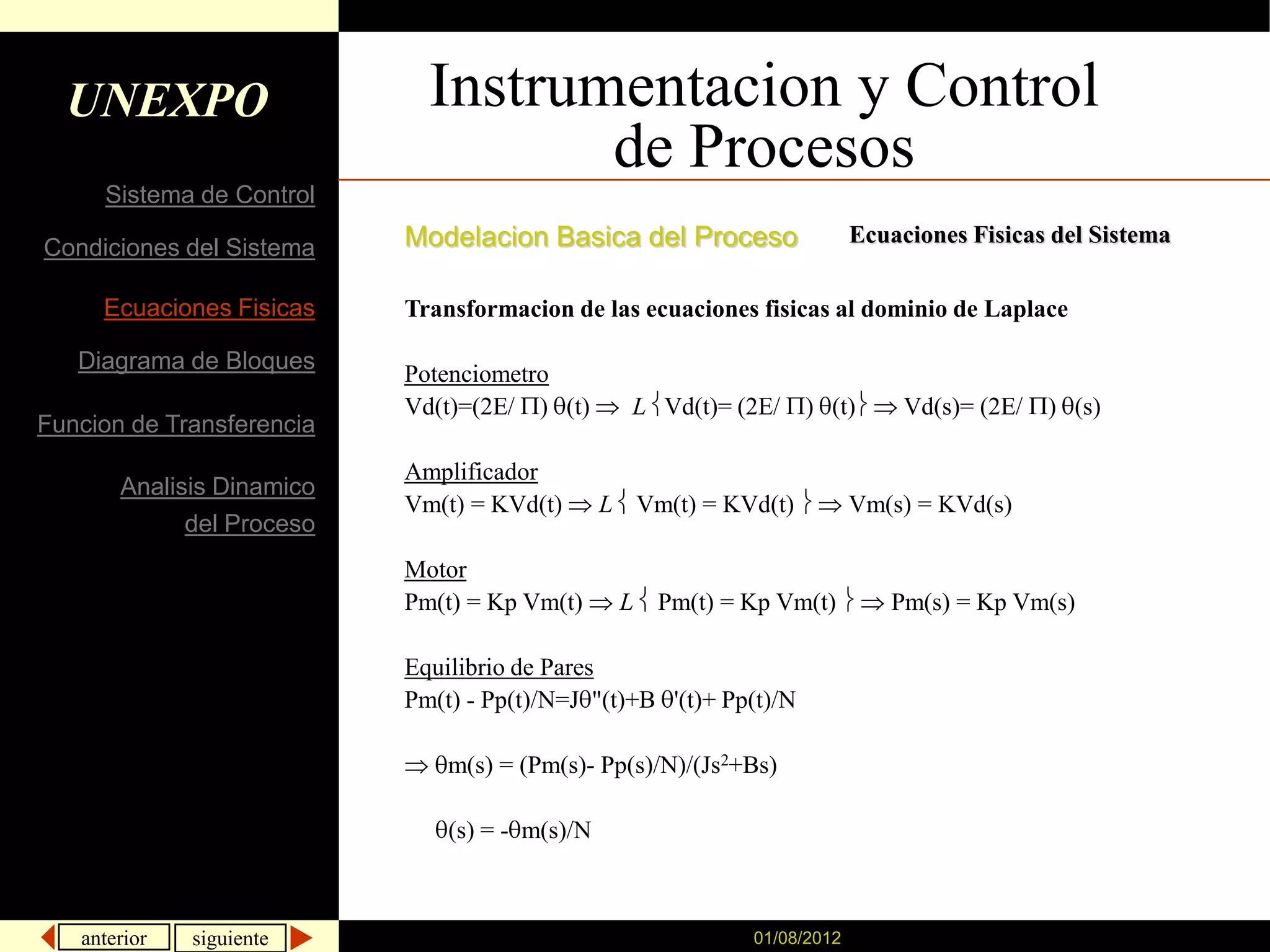
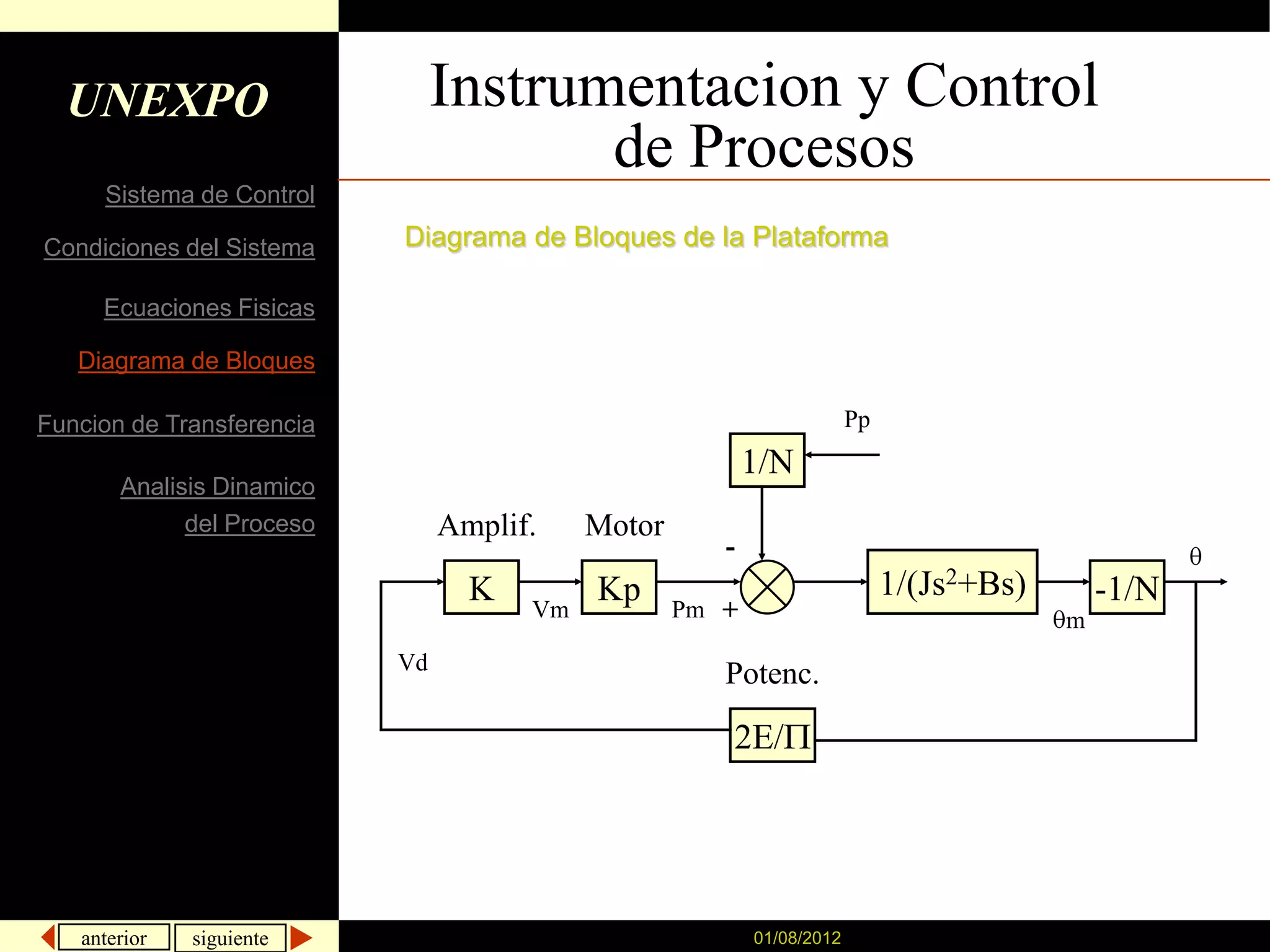
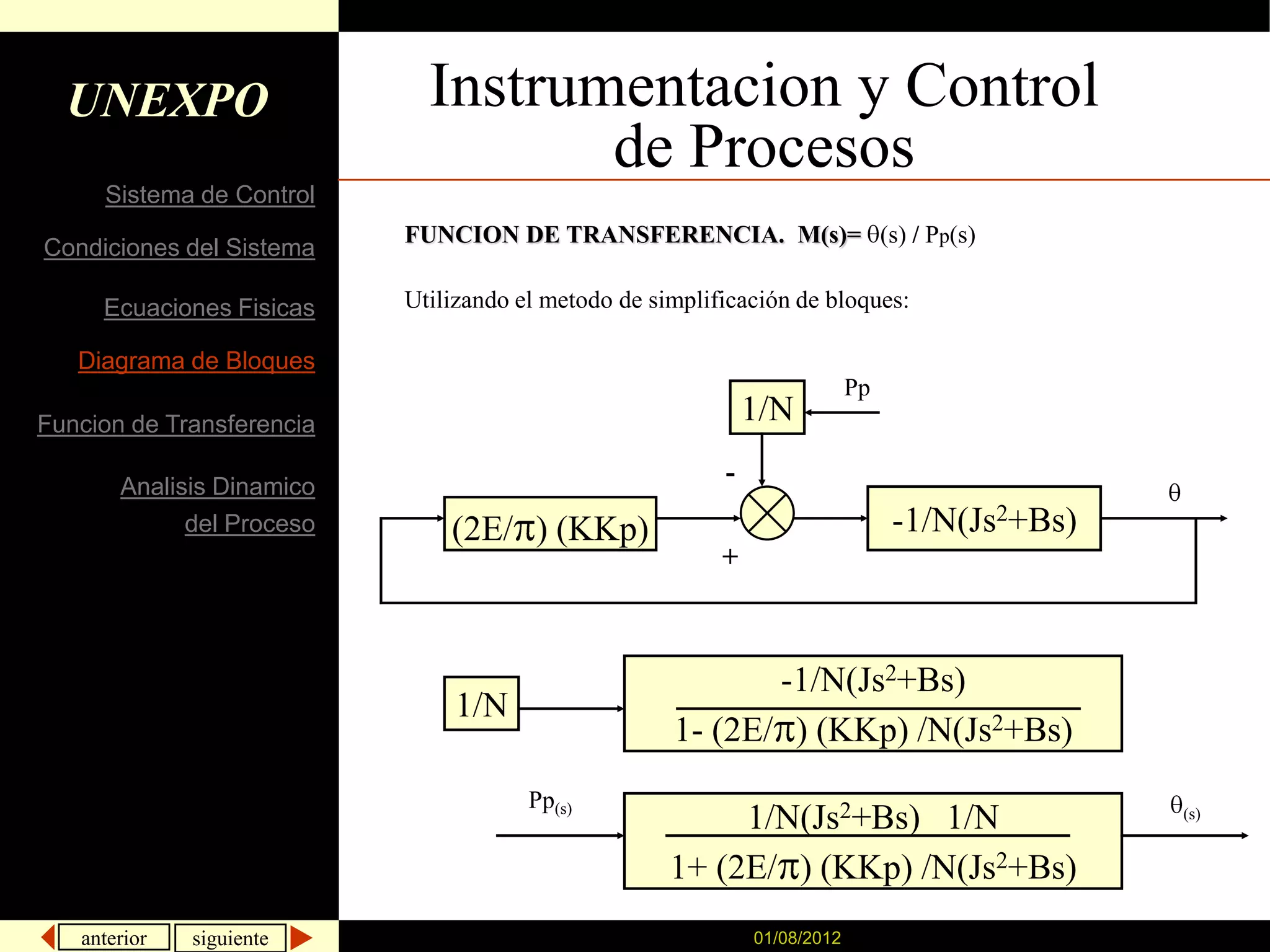
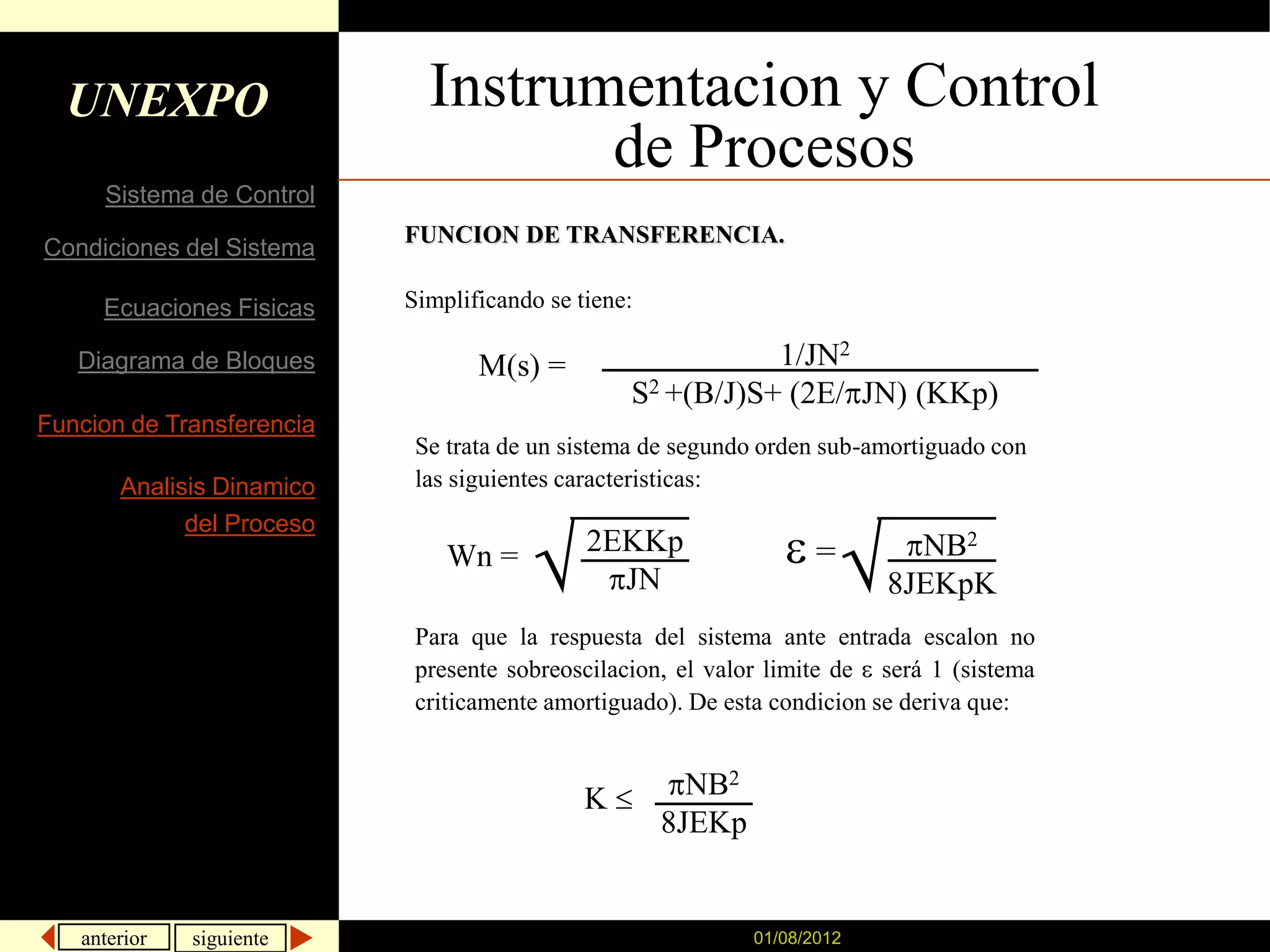

El documento aborda el control de nivel horizontal de una plataforma giratoria, describiendo su modelación mediante ecuaciones físicas y diagramas de bloques que incluyen un servomecanismo y un potenciometro. Se analizan los diferentes componentes del sistema, como el motor y la transmisión, así como el equilibrio de pares y la transformación de ecuaciones al dominio de Laplace. Finalmente, se concluye que el sistema es de segundo orden sub-amortiguado y se establece una condición para evitar sobreoscilaciones en la respuesta ante una entrada escalón.

































































































