Descargado 103 veces


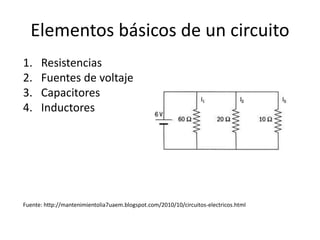
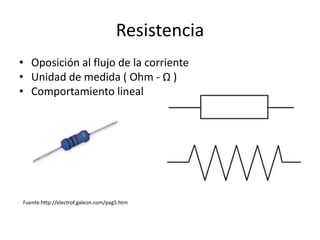
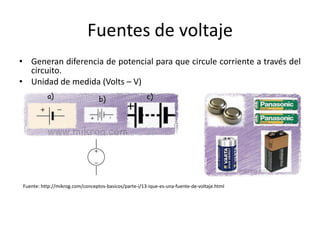
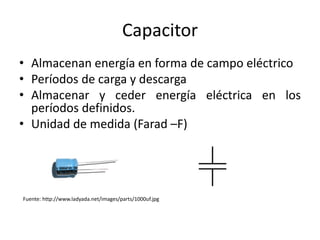
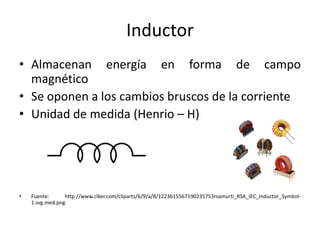
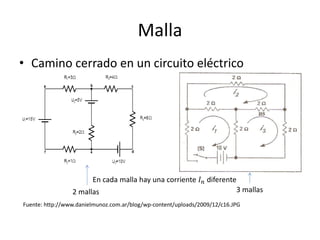
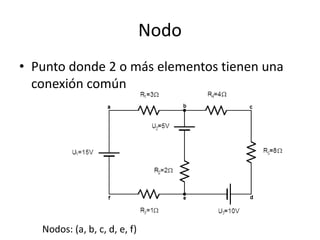
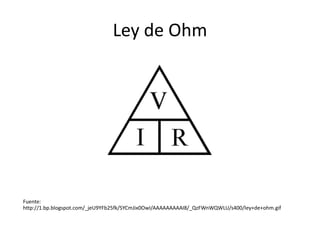
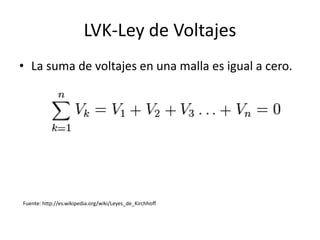
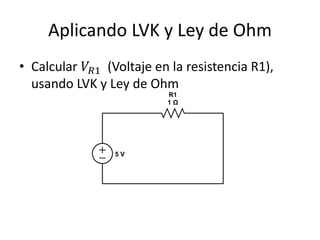
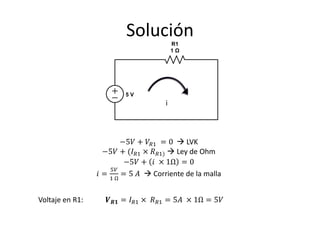
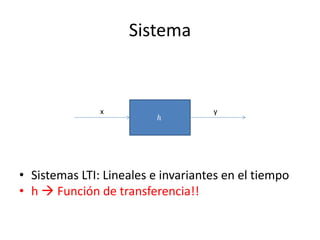
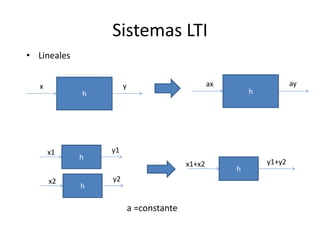
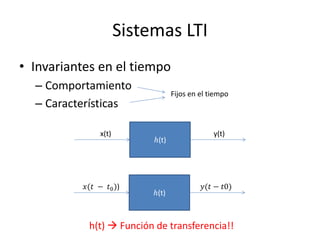
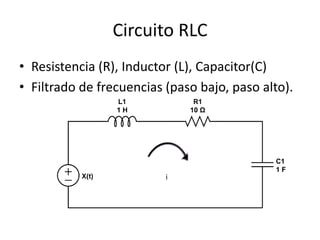
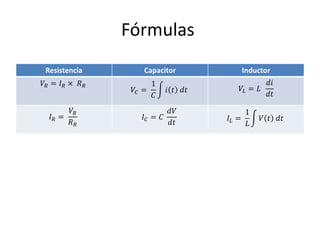
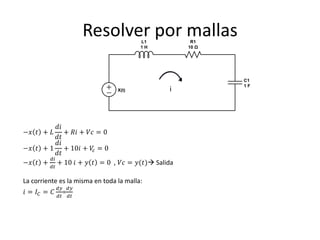
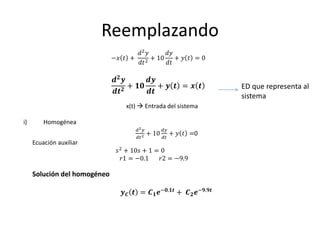
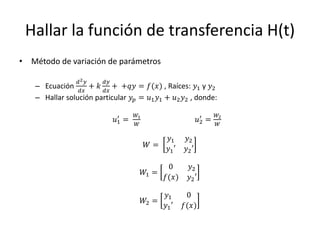
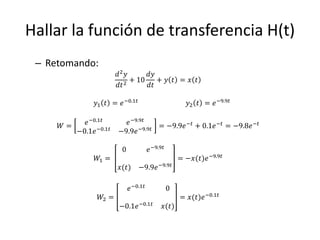
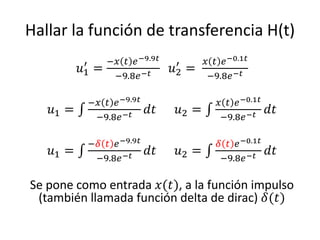
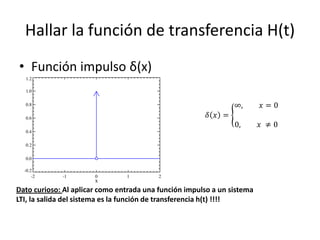
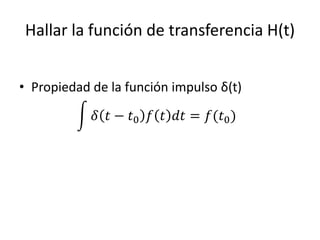
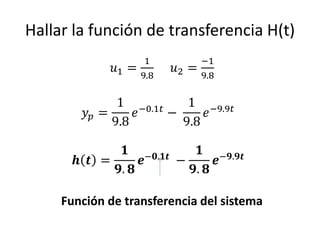
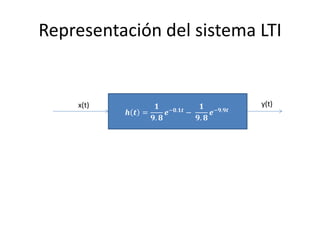

Este documento resume los elementos básicos de un circuito eléctrico como resistencias, fuentes de voltaje, capacitores e inductores. Explica conceptos clave como mallas, nodos, leyes de Kirchhoff y la ley de Ohm. Además, introduce el modelado de circuitos con ecuaciones diferenciales de orden superior, describiendo sistemas lineales e invariantes en el tiempo y cómo resolverlos mediante la función de transferencia.





































































































