Descargado 2562 veces
![La función de transferencia
L [ c(t )] c (t ) = salida
Función de transferencia =
L [ r (t )] r (t ) = entrada
con condiciones iniciales cero
La función de transferencia:
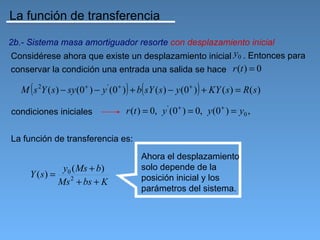
La función de transferencia de un sistema se define como la
transformada de Laplace de la variable de salida y la transformada de
Laplace de la variable de entrada, suponiendo condiciones iniciales cero.
•Solo es aplicable a sistemas descritos por ecuaciones diferenciales
lineales invariantes en el tiempo.
•Es una descripción entrada salida del comportamiento del sistema.
•Depende de las características del sistema y no de la magnitud y tipo
de entrada
•No proporciona información acerca de la estructura interna del sistema](https://image.slidesharecdn.com/funcionesdetransferencia-090718174011-phpapp02/85/Funciones-De-Transferencia-2-320.jpg)













El documento describe la función de transferencia de sistemas lineales. La función de transferencia es la relación entre la salida y la entrada de un sistema lineal, representada como la transformada de Laplace de la salida dividida por la transformada de Laplace de la entrada, suponiendo condiciones iniciales cero. Se proporcionan ejemplos de funciones de transferencia para circuitos RC y sistemas masa-resorte. También se describen diagramas de bloques para representar gráficamente las relaciones de entrada-salida de un sistema.



































































