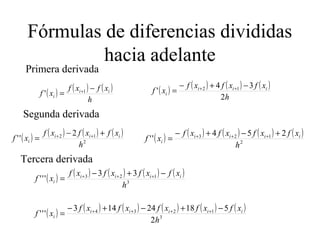
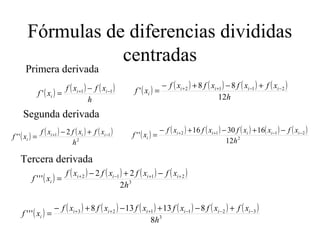
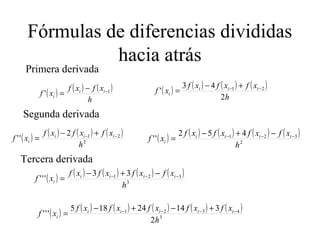
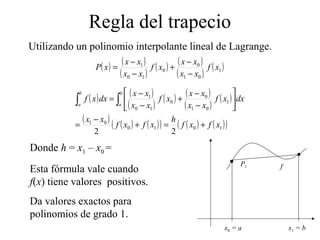
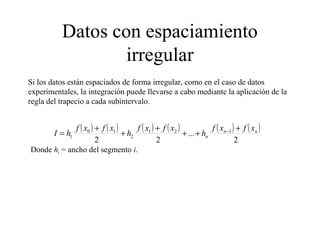
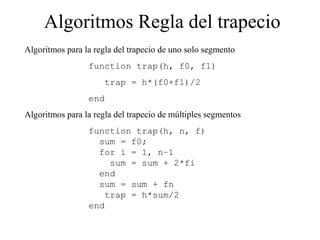
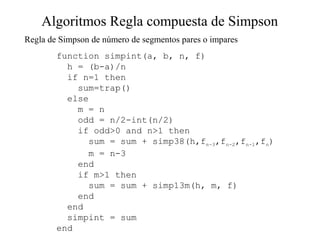
Este documento describe diferentes métodos numéricos para la diferenciación e integración. Explica la diferenciación numérica mediante la definición de derivada y presenta las fórmulas de diferencias progresivas, regresivas y centrales. También describe varias reglas para la integración numérica como la regla del rectángulo, del punto medio, del trapecio y de Simpson, así como su aplicación compuesta en varios intervalos.


![Regla del rectángulo
La función y=f(x) se reemplaza en el entorno de integración
[Xo,Xo+h], por el segmento horizontal BD, y en
consecuencia el área verdadera ABCE por la del rectángulo
ABDE.
El error cometido adoptando tal simplificación viene medido
por el área del triangulo curvilíneo BCD.](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-10-320.jpg)

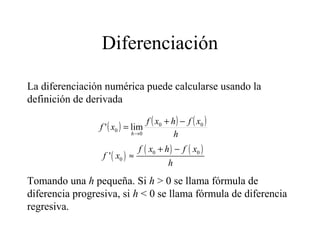
![REGLA DEL PUNTO MEDIO
La función f(x) se aproxima mediante la recta paralela al
eje OX trazada por el punto medio del intervalo,
[Xo,Xo+h], es decir, por : Xo + 1 / 2h](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-12-320.jpg)

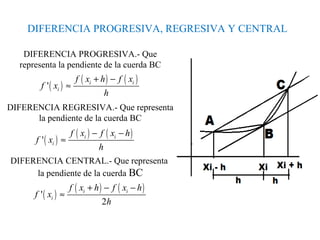
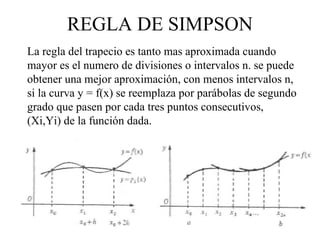
![REGLA DEL TRAPECIO
• La función f(x) se aproxima por la cuerda
de la curva dentro del intervalo, [Xo,Xo+h].
Se trata de una aproximación lineal. El arco
BC se sustituye por la cuerda BC.](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-14-320.jpg)



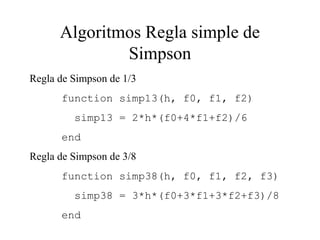
![Regla se Simpson
La regla se Simpson se obtiene suponiendo el segundo polinomios
de Lagrange con los nodos x0 = a, x2 = b, x1 = a + h, h = (b – a)/2.
( ) ( )( )
( )( )
( ) ( )( )
( )( )
( ) ( )( )
( )( )
( )
( ) ( ) ( )[ ]210
2
1202
10
1
2101
20
0
2010
21
4
3
xfxfxf
h
dxxf
xxxx
xxxx
xf
xxxx
xxxx
xf
xxxx
xxxx
dxxf
b
a
b
a
++=
−−
−−
+
−−
−−
+
−−
−−
= ∫∫
Donde se han
despreciado los términos
de error.
La fórmula es exacta para
polinomios de hasta
tercer grado. x0 = a x2 = b
P3f
x1](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-20-320.jpg)
![Regla se Simpson
La regla se Simpson se obtiene suponiendo el segundo polinomios
de Lagrange con los nodos x0 = a, x2 = b, x1 = a + h, h = (b – a)/2.
( ) ( )( )
( )( )
( ) ( )( )
( )( )
( ) ( )( )
( )( )
( )
( ) ( ) ( )[ ]210
2
1202
10
1
2101
20
0
2010
21
4
3
xfxfxf
h
dxxf
xxxx
xxxx
xf
xxxx
xxxx
xf
xxxx
xxxx
dxxf
b
a
b
a
++=
−−
−−
+
−−
−−
+
−−
−−
= ∫∫
Donde se han
despreciado los términos
de error.
La fórmula es exacta para
polinomios de hasta
tercer grado. x0 = a x2 = b
P3f
x1](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-21-320.jpg)
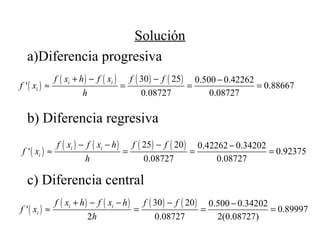
![Comparación
f(x) x^2 x^4 1/(x + 1) sqrt(1 + x2) sen x exp(x)
Valuación exacta 2.667 6.400 1.099 2.958 1.416 6.389
Trapecio 4.000 16.000 1.333 3.236 0.909 8.389
De Simpson 2.667 6.667 1.111 2.964 1.425 6.421
Comparación entre el valor exacto, la regla del trapecio y
la regla de Simpson para diferentes funciones en el
intervalo [0 , 2].](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-22-320.jpg)
![Regla de Simpson 3/8
Ajustando polinomios de Lagrange de orden 3 usando cuatro
puntos se llega a la regla de Simpson de 3/8
( ) ( ) ( ) ( ) ( )[ ]3210 33
8
3
xfxfxfxf
h
xfI
b
a
+++== ∫
También puede expresarse por:
( ) ( ) ( ) ( ) ( ) ( )[ ]
8
33 3210 xfxfxfxf
abxfI
b
a
+++
−== ∫
Esta regla es útil cuando el número de puntos es impar.](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-23-320.jpg)
![Integración numérica compuesta
[ ] 76958.56´4
3
2 420
4
0
=++≈∫ eeedxex
Integrando ex
por Simpson en [0,4]
El error es: 53.59815 – 56.76958 = –3.17143
Separando en dos integrales:
[ ] [ ]
[ ]
86385.53
424
3
1
4
3
1
4
3
1
4320
43220
4
2
2
0
4
0
=
++++=
+++++≈
+= ∫∫∫
eeeee
eeeeee
dxedxedxe xxx](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-24-320.jpg)
![Dividiendo en 4 intervalos
[ ] [ ]
[ ] [ ]
[ ]
61622.53
4242424
3
1
4
6
1
4
6
1
4
6
1
4
6
1
4320
4332
20
4
3
3
2
2
1
1
0
4
0
2
7
2
5
2
3
2
1
2
7
2
5
2
3
2
1
=
++++++++=
++++++
+++++≈
+++= ∫∫∫∫∫
eeeeeeeee
eeeeee
eeeeee
dxedxedxedxedxe xxxxx
El error es: 53.59815 – 53.61622 = –0.01807](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-25-320.jpg)
![Regla compuesta de Simpson
( ) ( ) ( )
( )
( ) ( )
+++= ∑∑∫ =
−
−
=
bfxfxfaf
h
dxxf
n
j
j
n
j
j
b
a
2/
0
12
12/
0
2 42
3
Teorema. Sea f ∈C4
[a, b], n par, h = (b – a)/n, y xj = a + jh para
cada j = 0, 1, 2, ... n . La regla de Simpson para n subintervalos
puede escribirse como:
x0 = a xn = b
y= f(x)
x2 x2j-1 x2j x2j+1](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-26-320.jpg)
![Regla compuesta del trapecio
( ) ( ) ( ) ( )
++= ∑∫
−
=
bfxfaf
h
dxxf
n
j
j
b
a
1
1
2
2
x0 = a xn = b
y= f(x)
x1 xj-1 xj xn–1
Teorema. Sea f ∈C4
[a, b], n par, h = (b – a)/n, y xj = a + jh para
cada j = 0, 1, 2, ... n . La regla del trapecio para n subintervalos
puede escribirse como:](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-27-320.jpg)
![Regla compuesta del punto
medio
( ) ( )∑∫ =
=
2/
0
22
n
j
j
b
a
xfhdxxf
x0 = a xn+1 = b
y= f(x)
x0 xj-1 xj xnx1 xj+1
Teorema. Sea f ∈C4
[a, b], n par, h = (b – a)/(n+2), y xj = a +
(j+1)h para cada j = –1, 0, 1, 2, ... n+1. La regla de compuesta
del punto medio para n subintervalos puede escribirse como:](https://image.slidesharecdn.com/diferenciacionintegracion-150811035508-lva1-app6892/85/Diferenciacion-integracion-28-320.jpg)

























![Interpolación lagrange[1]](https://cdn.slidesharecdn.com/ss_thumbnails/interpolacin-lagrange1-131220172359-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



































