
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Similar a Elementos de-una-proyeccin
Más de Alfredo Marmolejo
Más de Alfredo Marmolejo (20)
Elementos de-una-proyeccin
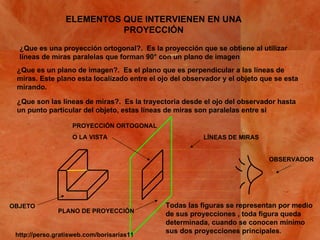
- 1. ELEMENTOS QUE INTERVIENEN EN UNA PROYECCIÓN ¿Que es una proyección ortogonal?. Es la proyección que se obtiene al utilizar líneas de miras paralelas que forman 90° con un plano de imagen ¿Que es un plano de imagen?. Es el plano que es perpendicular a las líneas de miras. Este plano esta localizado entre el ojo del observador y el objeto que se esta mirando. ¿Que son las líneas de miras?. Es la trayectoria desde el ojo del observador hasta un punto particular del objeto, estas líneas de miras son paralelas entre si PROYECCIÓN ORTOGONAL O LA VISTA LÍNEAS DE MIRAS OBSERVADOR OBJETO Todas las figuras se representan por medio PLANO DE PROYECCIÓN de sus proyecciones , toda figura queda determinada, cuando se conocen mínimo sus dos proyecciones principales. http://perso.gratisweb.com/borisarias11
- 2. PLANOS DE PROYECCIÓN Imaginemos un cubo de cristal, las caras del cubo se consideraran los planos principales de proyección, donde más adelante obtendremos las vistas de un punto, una línea, de un plano y de un sólido. 1= Plano Horizontal H 1 H F P 2= Plano Frontal 2 3 3= Plano de Perfil F P 1= Plano Horizontal : Es el plano cuyos puntos están todos a la misma elevación. La vista se determina por la proyección del objeto sobre el plano. Las líneas de miras son verticales a este plano por lo tanto perpendiculares 1= Plano Frontal : Es el plano de imagen a 90° con el plano horizontal y de perfil. La vista se determina por la proyección del objeto sobre el plano. Las líneas de miras son Horizontales a este plano por lo tanto perpendiculares 1= Plano Perfil : Es el plano de imagen a 90° con el plano horizontal y el frontal. La vista se determina por la proyección del objeto sobre el plano. Las líneas de miras son Horizontales a este plano por lo tanto perpendiculares http://perso.gratisweb.com/borisarias11
- 3. MÉTODO DE CAMBIO DE POSICIÓN PARA OBTENER LAS VISTAS Introduciremos un objeto dentro del cubo en proyección Isométrica para obtener las vistas. DEPURADO DEL CUBO: Es abrir las caras del cubo sobre un mismo plano http://perso.gratisweb.com/borisarias11
- 4. MÉTODO DE CAMBIO DE POSICIÓN PARA OBTENER LAS VISTAS Introduciremos un objeto dentro del cubo en proyección Oblicua Gabinete para obtener las vistas. DEPURADO DEL CUBO: Es abrir las caras del cubo sobre un mismo plano http://perso.gratisweb.com/borisarias11
- 5. EJERCICIO PROYECCIÓN DENTRO DEL CUBO DEPURADODEL CUBO PROFUNDIDAD ANCHO ALTURA ALTURA ANCHO PROFUNDIDAD http://perso.gratisweb.com/borisarias11
- 6. EJERCICIOS Los objetos dados introducirlos dentro del cubo hallar sus vistas y dibujar sus depurados del cubo http://perso.gratisweb.com/borisarias11
- 7. EJERCICIOS Los objetos dados introducirlos dentro del cubo hallar sus vistas y dibujar sus depurados del cubo http://perso.gratisweb.com/borisarias11