1. El documento describe diferentes tipos de transmisiones mecánicas, incluyendo correas, cadenas, ruedas de fricción y engranajes.
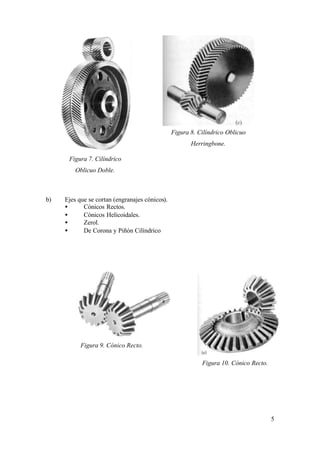
2. Se detalla los tipos de engranajes cilíndricos, cónicos e hiperbólicos, y sus ventajas e inconvenientes. Los engranajes helicoidales transmiten más potencia que los rectos.
3. Para lograr una transmisión constante sin deslizamiento, se requiere un par de perfiles rodantes cuya línea de centros y normal común intersecten en