Descargar para leer sin conexión

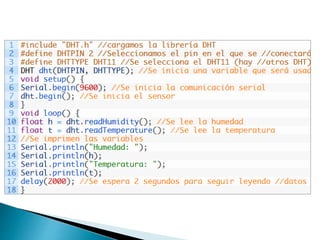



Este documento describe las diferencias entre señales analógicas y digitales. Las señales analógicas varían de forma continua mientras que las señales digitales solo pueden tomar valores discretos. El proceso de convertir una señal analógica a digital implica muestreo, retención, cuantificación y codificación. También explica conceptos como biestables, lógica programable, sensores DHT11 y acelerómetros.

















































































