Descargar como PDF, PPTX

































![Esta
guía
se
distribuye
bajo
licencia
Reconocimiento-‐
ComparIrIgual
CreaIve
commons
4.0
(cc)
2015
José
Pujol
Pérez
Some
rights
reserved.
This
work
licensed
under
CreaIve
Commons
A]ribuIon-‐ShareAlike
License.
To
view
a
copy
of
full
license,
see
h]p://creaIvecommons.org/licenses/by-‐sa/3.0/
or
write
to
CreaIve
Commons,
559
Nathan
Abbo]
Way,
Stanford,
California
94305,
USA.
Some
of
the
figures
have
been
taken
from
the
Internet
Source,
and
author
and
licence
if
known,
is
specified.
For
those
images,
fair
use
applies.
licenciaLICENCIA](https://image.slidesharecdn.com/taller-espaciores-d2-150312105119-conversion-gate01/85/Taller-Arduino-espacio-RES-2-Sesion-40-320.jpg)

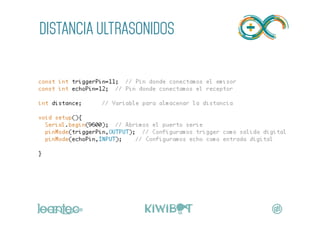
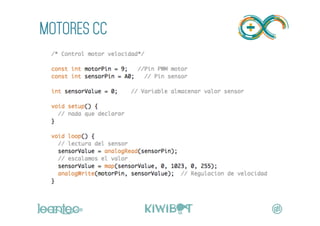
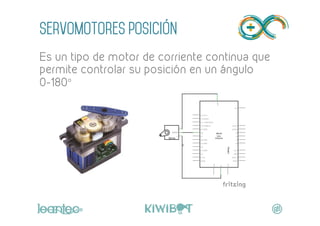
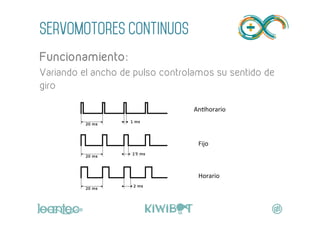
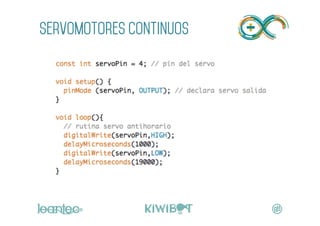
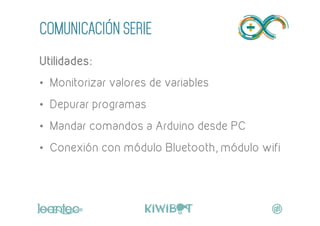
Este documento proporciona una guía sobre sensores y motores para Arduino. Explica diferentes tipos de sensores como sensores de luz, posición, temperatura, humedad, vibración, aceleración y distancia. También cubre motores CC, servomotores de posición y servomotores continuos, así como comunicación serie entre Arduino y PC. El documento incluye ejemplos de código para cada sensor y motor.

























































![Control de un Motor [Autoaaaaaaaaaaaaaaaaaguardado].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/controldeunmotorautoguardado-241113235820-1bbdae93-thumbnail.jpg?width=640&height=640&fit=bounds)












































