Instrumentacion ii
•
2 recomendaciones•6,502 vistas

Este documento introduce conceptos básicos sobre instrumentación industrial. Explica que los procesos industriales requieren controlar variables como presión, caudal y temperatura. Describe los elementos clave de un lazo de control, incluyendo sensores, transmisores, controladores e instrumentos. También define términos como rango, alcance, sensibilidad y errores de medición, los cuales son importantes para comprender el funcionamiento de los instrumentos.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a Instrumentacion ii
Similar a Instrumentacion ii (20)
Más de José Manuel Valdez
Más de José Manuel Valdez (7)
Instrumentacion ii
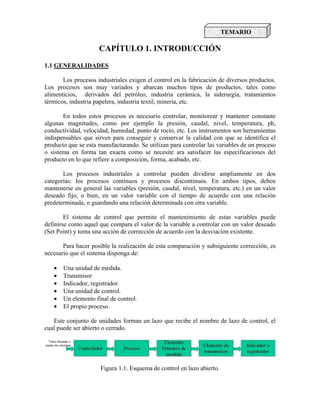
- 1. CAPÍTULO 1. INTRODUCCIÓN 1.1 GENERALIDADES Los procesos industriales exigen el control en la fabricación de diversos productos. Los procesos son muy variados y abarcan muchos tipos de productos, tales como alimenticios, derivados del petróleo, industria cerámica, la siderurgia, tratamientos térmicos, industria papelera, industria textil, minería, etc. En todos estos procesos es necesario controlar, monitorear y mantener constante algunas magnitudes, como por ejemplo la presión, caudal, nivel, temperatura, ph, conductividad, velocidad, humedad, punto de rocío, etc. Los instrumentos son herramientas indispensables que sirven para conseguir y conservar la calidad con que se identifica el producto que se esta manufacturando. Se utilizan para controlar las variables de un proceso o sistema en forma tan exacta como se necesite ara satisfacer las especificaciones del producto en lo que refiere a composición, forma, acabado, etc. Los procesos industriales a controlar pueden dividirse ampliamente en dos categorías: los procesos continuos y procesos discontinuos. En ambos tipos, deben mantenerse en general las variables (presión, caudal, nivel, temperatura, etc.) en un valor deseado fijo, o bien, en un valor variable con el tiempo de acuerdo con una relación predeterminada, o guardando una relación determinada con otra variable. El sistema de control que permite el mantenimiento de estas variables puede definirse como aquel que compara el valor de la variable a controlar con un valor deseado (Set Point) y toma una acción de corrección de acuerdo con la desviación existente. Para hacer posible la realización de esta comparación y subsiguiente corrección, es necesario que el sistema disponga de: • Una unidad de medida. • Transmisor • Indicador, registrador. • Una unidad de control. • Un elemento final de control. • El propio proceso. Este conjunto de unidades forman un lazo que recibe el nombre de lazo de control, el cual puede ser abierto o cerrado. Figura 1.1. Esquema de control en lazo abierto. TEMARIO
- 2. Figura 1.2. Esquema de control en lazo cerrado. Los elementos que componen el lazo de control en los esquemas de las figuras 1.1 y 1.2 son: • Elemento primario de medida: Es un elemento que utiliza o transforma energía del medio controlado (producto) para producir un efecto en respuesta a un cambio en el valor de la variable controlada. El efecto producido por el elemento primario puede ser un cambio de presión, fuerza, posición, potencial, eléctrico, resistencia. • Elemento de transmisión: Elementos que captan la variable de proceso a través del elemento primario y la transmiten a distancia en forma de señal normalizada, como por ejemplo en forma de señal neumática de margen de 3 a 15 psi, o electrónica de 4-20 mA de corriente continua. En algunos casos el elemento primario puede formar parte integral del transmisor • Indicadores y Registradores: Los instrumentos indicadores señalan con un índice en una escala graduada el valor de la variable, o bien si es digital muestra la variable en forma numérica con dígitos. Los registradores, tal como su nombre lo indica, registran con trazo continuo o a puntos la evolución en el tiempo de la variable. • Señal de referencia (Set Point): Es aquel valor de la variable controlada que deseamos mantener. • Error: Es la diferencia entre el valor instantáneo y el valor deseado de la variable controlada. • Controlador: Elementos de un control automático que determinan el error y ejercen una acción correctiva de acuerdo con la desviación. • Acciones de Control (Variables manipuladas): Es aquella cantidad o condición que es variada por un control automático de forma tal que altere el valor de la variable controlada. • Elemento final de control: Elemento empleado en producir una acción correctora, cambiando directamente el valor de la variable manipulada.
- 3. • Variable controlada: Es aquella cantidad o condición que es medida y controlada. La variable controlada es una condición o característica del medio controlado. • Proceso: Es todo aquel sistema o conjunto de sistemas en el cual se efectúa un cambio o reacción físico o químico. 1.2 TERMINOLOGÍA EMPLEADA EN INSTRUMENTACIÓN. Se detalla a continuación la terminología empleada en los instrumentos de control de control siguiendo las sugerencias de la SAMA (Scientific Apparatus Makes Association). Rango del instrumento o Campo de medida: Espectro o conjunto de valores de la variable medida que están comprendidos dentro de los límites superior e inferior de la capacidad de medida o de transmisión del instrumento; se expresa estableciendo los dos valores extremos. En el ejemplo de la figura 1.3, el campo de medida del instrumento de temperatura es de -40/200 F. Figura 1.3. Es importante distinguir la diferencia entre el rango del instrumento y el rango de medición de este, ya que este ultimo depende de la escala en la que se esta utilizando el instrumento para la medición. Para distinguir la diferencia entre ellos se hará referencia a los esquemas de las figuras 1.4 y 1.5.
- 4. Figura 1.4. Figura 1.5. Los esquemas de la figura 1.4 y 1.5 representan a un indicador de la temperatura medida por un instrumento. Abajo en la derecha del indicador, existe un selector de escala, el cual amplifica por uno, dos y cinco el rango de valores mostrados por el indicador. Para los casos de la figura 1.4 y 1.5 el rango del instrumento es el mismo, ya que para ambos indicadores la lectura mínima corresponde a los 0ºC, mientras que la máxima ocurre cuando la escala de amplificación es 5, caso en que el instrumento puede sensar 120*5=600ºC, luego el rango del instrumento es 0/600ºC. Sin embargo, el rango de medición del caso de la figura 1.4 es distinto que para el caso de la figura 1.5. Esto es debido a que en la figura 1.4 la escala de amplificación es uno, y por tanto el instrumento puede indicar valores de temperatura comprendidos entre 0-120ºC, mientras que en la figura 1.5 la escala de amplificación es dos, por lo que el instrumento puede indicar valores de temperatura comprendidos entre 0-240ºC. Ajustes de calibración: Los ajustes de calibración pertenecen a uno o ambas de dos categorías, ajustes por errores de cero (desplazamiento del offset u “offset shift”) y ajustes por errores angulares (desplazamiento del span o “span shift”) • Ajustes de cero (“offset shift”): El error de cero es un desplazamiento lineal del rango. El ajuste consiste en desplazar el rango linealmente para obtener la lectura de cero correcta. La grafica de la figura 1.6 muestra como la función que relaciona el rango de entrada del instrumento (variable primaria) con el rango de salida de este (variable secundaria) tiene un desplazamiento con respecto al cero.
- 5. Figura 1.6. • Ajustes angulares (“span shift”): El error angular presenta una lectura correcta en cualquier punto arbitrario de la escala, por ejemplo el cero en la escala; y un error que aumenta en proporción a la distancia de este punto. Esto requiere ajustar la relación de las señales de entrada y salida que es generalmente obtenida al cambiar por ejemplo la ganancia de un circuito eléctrico para aumentar o disminuir el rango de salida para una determinada señal de entrada. La grafica de la figura 1.7 muestra como este cambio de ganancia en la función que relaciona el rango de entrada del instrumento (variable primaria) con el rango de salida de este (variable secundaria), genera un cambio de pendiente de la función. Figura 1.7. Errores de cero y errores angulares, generalmente están combinados en el error de calibración total pero requieren ajustes por separado. Así por ejemplo, en la figura 1.8 se muestra que para obtener la curva calibrada a partir de la curva especificada, se realizo en primer lugar un ajuste del offset shift, y luego, una corrección del span shift.
- 6. Figura 1.8. Rango de Señales: Existen varios tipos de señales de transmisión que permiten a un instrumento receptor indicador, registrador o controlador captar la variable de proceso. Las más comunes son: neumáticas, eléctricas, digitales, hidráulicas, y telemétricas, siendo las tres primeras las mas utilizadas en la industria. Las señales neumáticas son variables linealmente de 3 a 15 psi para el campo de medida de 0-100% de la variable. En países donde se utiliza el sistema métrico decimal se emplea además la señal 0.2-1 bar, que equivale aproximadamente a 3-15 psi. Las señales eléctricas generadas por los transmisores se estandarizan en el rango 4- 20 mA c.c. a distancias de 500 m. a 1 Km según sea el tipo de instrumento transmisor. También puede encontrarse transmisores que envían señales de 1-5 mA c.c., 0-5 mA c.c., 0- 20 mA c.c y de 1-5 V c.c. Span(Alcance): Es la diferencia algebraica entre los valores superior e inferior del campo de medida del instrumento. En el ejemplo de la figura 1.9, el Span es de 240 F
- 7. Figura 1.9. El Span depende del rango de medición del instrumento, y por tanto, de la escala utilizada para medir. La figura 1.10 muestra como para un mismo instrumento se pueden tener distintos valores de Span en función de la escala utilizada. a) Escala de1 b)Escala de 2 c)Escala de 5 Figura 1.10. Sensitividad o ganancia estática: Corresponde a la ganancia estática de un elemento, o ganancia de lazo del sistema, y su valor equivale al límite cuando la frecuencia se aproxima a cero. Este valor corresponde al radio de variación de la respuesta de estado estable del sistema a un pulso de cambio en la entrada, con tal de que no sature la salida.
- 8. Error de medición: Es la diferencia algebraica entre el valor leído o transmitido por el instrumento y el valor real de la variable medida (también conocido con el nombre de error instantáneo o dinámico). En condiciones dinámicas el error varia considerablemente debido a que los instrumentos tienen características comunes a los sistemas físicos, esto es, absorben energía del proceso y esta transferencia requiere cierto tiempo para ser transmitida, dando lugar a retardos en la lectura. Cuando el proceso se encuentra en condiciones de régimen permanente, existe el llamado error estático (Ver figura 1.11). Otra definición aceptada es la de error medio del instrumento, el cual es la media aritmética de los errores en cada punto de la medida determinados para todos los valores crecientes y decrecientes de la variable medida. Figura 1.11. Cuando una medición se realiza con la participación de varios instrumentos colocados unos a continuación de otros, el valor final de la medición estará constituido por los errores inherentes a cada uno de los instrumentos. Suele tomarse como error total de una medición la raíz cuadrada de la suma algebraica de los cuadrados de los errores máximos de los instrumentos. Por ejemplo, el error obtenido al medir un caudal con un diafragma, un transmisor electrónico de 4-20 mA cc, un receptor y un integrador electrónico es de: Error del diafragma = 2% Error del transmisor electrónico = 0.5% Error del receptor electrónico = 0.5% Error del integrador electrónico = 0.5% Error total de la medición = %18.25.05.05.02 2222 =+++± Precisión: Es la tolerancia de medida o de transmisión del instrumento, o dicho en otras palabras, el intervalo donde es admisible que se sitúe la magnitud de la medida, y define los límites de los errores cometidos cuando el instrumento se emplea en condiciones normales de servicio durante un periodo de tiempo determinado.
- 9. Figura 1.12. Para explicar el significado de este concepto, se tomara como ejemplo el esquema de la figura 1.12. Supongamos que se realiza una prueba con un sensor de temperatura, en la que se mide en distintas ocasiones el mismo valor de temperatura de entrada, indicada en color verde en la grafica de la figura 1.12. Las respuestas del sensor de temperatura ante la señal de entrada tienen la forma indicada por las graficas azules. La señal de salida real difiere del valor correcto debido a las imperfecciones inherentes en el control. El grado de aproximación al cual la señal de salida se aproxima al valor correcto es la precisión. Hay varias formas de expresar la precisión: • Tanto por ciento del alcance. Ejemplo: Se tiene un instrumento con los siguientes datos Span=200ºC Lectura=150ºC Precisión= ± 0.5% Valor real de temperatura= 1150 100 200*5.0 150 ±=± , es decir, entre 149 y 151ºC • Directamente en unidades de la variable medida. Ejemplo: Precisión de ± 1ºC. • Tanto por ciento de la lectura efectuada. Ejemplo: Precisión= ± 1% Lectura=150ºC Valor real de temperatura= 5.1150 100 1*150 150 ±=± , es decir, entre 148.5 y 151.5ºC • Tanto por ciento del valor máximo del campo de medida. Ejemplo: Rango de medición: 1/300ºC Precisión: ± 0.5% Lectura:150ºC
- 10. Valor real de temperatura= 5.1150 100 5.0*300 150 ±=± , es decir, entre 148.5 y 151.5ºC. La especificación de precisión por un número deja abierta varias interrogantes relacionadas mayormente con las condiciones bajo las cuales se determino esta precisión, como por ejemplo saber si la especificación de precisión dada corresponde al promedio de un número de lecturas, o es solamente obtenible para ciertos valores. Para poder dar una indicación práctica de la precisión, deberá escogerse el valor de precisión que corresponda al valor más alto en toda la escala. Si esto se hace así, entonces las condiciones a las que se refiere la lectura de precisión deben ser especificadas. Hay que señalar que los valores de precisión de un instrumento se consideran en general establecidos para el usuario, es decir, son los proporcionados por los fabricantes de los instrumentos. El fabricante especifica la precisión en todo el margen del instrumento, indicando algunas veces su valor en algunas zonas de la escala. Zona muerta: Es el campo de valores de la variable de entrada que no hace variar la indicación o la señal de salida del instrumento, es decir, que no produce su respuesta. Viene dada en tanto por ciento del alcance de la medida. Por ejemplo: Se tienen los siguientes datos de un instrumento para medición de flujo: Span = 100 ml/s Zona muerta = ± 1% Esto significa que si se debe realizar un control de flujo a 60 ml/s, el flujo actual puede variar entre 59 y 61 ml/s sin producir cambio alguno en la señal de salida. Si el flujo ha estado a 59 ml/s al borde inferior de la zona muerta empieza ahora a aumentar, no se producirá ninguna acción hasta que el flujo sea de 61 ml/s, tal como se indica en la figura 1.13. Figura 1.13. Zona muerta = 1 100 100*1 ±=± ml/s
- 11. Esto significa por un lado que la variable controlada es capaz de cambiar a través de 2 ml/s, sin que haya acción correctiva, y además significa que si el flujo comienza a aumentar, la acción controladora es demorada. Esto es equivalente a tiempo muerto, y contribuye a la inestabilidad del circuito de control. Sensibilidad: Es la razón entre el incremento de la lectura y el incremento de la variable que lo ocasiona, después de haberse alcanzado el estado de reposo. Por ejemplo, si en un transmisor de temperatura de rango 0/200ºC, la temperatura pasa de 70ºC a 75ºC, y la señal de salida de 8 a mA a 9.6 mA, con un rango de salida de 4-20 mA. , entonces Sensibilidad = S = 4 025.0 1.0 200/5 16/6.1 200/)7075( 16/)86.9( ./ ./ === − − = ∆ ∆ inspanVP outspanVS En términos porcentuales, S=400% Repetibilidad: La repetibilidad es la capacidad de reproducción de las medidas de la señal de salida indicadas por el instrumento al medir repetidamente valores idénticos de la variable en las mismas condiciones de servicio y en el mismo sentido de variación, recorriendo todo el campo, tal como lo muestra la figura 1.14. Figura 1.14. Se considera en general su valor máximo (repetibilidad máxima) y se expresa en tanto por ciento del alcance. Para determinar la repetibilidad, el fabricante comprueba la diferencia entre el valor verdadero de la variable (x) y la indicación o señal de salida del instrumento recorriendo todo el campo (xi), y partiendo, para cada determinación, desde el valor mínimo del campo de medida. Así, para una muestra de N datos, la repetibilidad viene dada por la formula: Variable 70º C 75ºC Primaria Span: 200ºC Variable 8mA 9.6mA Secundaria Span: 16mA
- 12. N xxi∑ − 2 )( Histéresis: La histéresis es la diferencia máxima que se observa en los valores indicados por el instrumento para el mismo valor cualquiera del campo de medida, cuando la variable recorre toda la escala en los dos sentidos, ascendente y descendente, tal como lo muestra la figura 1.15. Figura 1.15. Se expresa en tanto por ciento del alcance de la medida. Por ejemplo, si se tiene un instrumento con los siguientes datos: Histéresis = ± 0.3% Span = 200ºC Histéresis del instrumento=± 0.6ºC Inexactitud: Para comprender el concepto de inexactitud es necesario primero hacer referencia a los conceptos de error sistemático y error aleatorio (precisión). El error sistemático se define como la diferencia entre el valor medio de las mediciones y el valor real de la magnitud medida, o también, la indicación de cuán cerca está una medición del valor real de la cantidad medida. La desviación del valor verdadero es un índice de que tan exactamente se ha llevado a cabo la lectura. El error sistemático se diferencia de la precisión en que esta última especifica la repetibilidad de un conjunto de lecturas, hechas cada una en forma independiente con el mismo instrumento. Para dar un ejemplo más palpable de la diferencia entre error sistemático y precisión, considérese el ejemplo de la figura 1.16, que corresponde a un juego de tiros al blanco, en el cual se mide la distancia de los impactos al centro del objetivo o centro del blanco. Para el caso de la figura 1.16 a) la no hay una buena precisión de los tiros, y por ende se tiene una alto error. Pero para el caso de la figura 1.16 b), la precisión de los tiros es buena dado que se tiene una alta
- 13. repetibilidad, pero el error sistemático de los tiros aun es alta dado que los tiros aun se encuentran lejos del blanco. Imagínese ahora un instrumento que tiene un defecto en su funcionamiento. El instrumento puede estar dando un resultado que es altamente repetible de medición a medición, pero alejado del valor verdadero, como lo caso de la figura 1.16 b). Los datos obtenidos de este instrumento serían de alta precisión pero muy erráticos. a) b) Figura 1.16. La inexactitud de medición puede ser definida como la suma de los errores sistemáticos y aleatorios. El error sistemático puede ser minimizada por calibración del instrumento y por capacitación del operador. La imprecisión en cambio se reduce por rediseño del instrumento o por medición de la magnitud con otro instrumento. Figura 1.17. Características Dinámicas: Es la representación de la salida de un dispositivo como una función de la entrada
- 14. Figura 1.18. Otros términos: • Campo de medida con elevación de cero: Es aquel campo de medida en que el valor cero de la variable o señal medida es mayor que el valor inferior del campo. Por ejemplo: -10º a 30ºC. • Campo de medida con supresión de cero: Es aquel campo de medida en el que el valor cero de la variable o señal medida es menor que el valor inferior del campo. Por ejemplo: 10º a 30ºC. • Elevación de cero: Es la cantidad con que el valor cero de la variable supera el valor inferior del campo. Puede expresarse en unidades de la variable medida o en % del alcance. • Supresión de cero: Es la cantidad con que el valor inferior del campo supera el valor cero de la variable. Puede expresarse en unidades de la variable medida o en % del alcance. • Deriva: Es una variación en la señal de salida que se presenta en un período de tiempo determinado mientras se mantienen constantes la variable medida y todas las condiciones ambientales. • Fiabilidad: Medida de la probabilidad de que un instrumento continúe comportándose dentro de los límites especificados de error a lo largo de un tiempo determinado y bajo condiciones especificadas. • Resolución: Magnitud de los cambios en escalón de la señal de salida (expresados en tanto por ciento de la salida de toda la escala) al ir variando continuamente la medida en todo el campo. • Resolución infinita: Capacidad de proporcionar una señal de salida progresiva y continua en todo el campo de trabajo del instrumento. • Ruido: Cualquier perturbación eléctrica o señal accidental no deseada que modifica la transmisión, indicación o registro de los datos deseados. • Linealidad: La aproximación de una curva de calibración a una línea recta especificada.
- 15. • Linealidad basada en puntos: Falta de linealidad expresada en forma de desviación máxima con relación a una línea recta que pasa a través de los puntos dados correspondientes al cero y al 100% de la variable medida. • Estabilidad: Capacidad de un instrumento para mantener su comportamiento durante su vida útil y de almacenamiento especificadas. • Temperatura de servicio: Campo de temperaturas en el cual se espera trabaje el instrumento dentro de los límites de error especificados. • Vida útil de servicio: Tiempo mínimo especificado durante el cual se aplican las características de servicio continuo e intermitente del instrumento sin que presenten cambios en su comportamiento más allá de tolerancia especificadas. • Reproductibilidad: Capacidad de reproducción de un instrumento de las medidas repetitivas de la lectura o señal de salida para el mismo valor de la variable medida alcanzado en ambos sentidos, en las mismas condiciones de servicio y a lo largo de un período de tiempo especificado. Por ejemplo, un valor representativo sería de ± 0.2% del alcance de la lectura o señal de salida a lo largo de un período de 30 días. • Respuesta frecuencial: Variación con la frecuencia de la relación de amplitudes señal de salida / variable medida (y de la diferencia de fases entre la salida y la variable medida) para una medida de variación de senoidal aplicada a un instrumento dentro de un campo establecido de frecuencias de la variable medida. 1.3. SENSORES MÁS UTILIZADOS. 1.3.1. Medidores de flujo. Placa orificio Consiste en una placa perforada instalada en la tubería. Dos tomas conectadas en la parte anterior y posterior de la placa, captan esta presión diferencial la cual es proporcional al cuadrado del caudal. Figura 1.19. Placa orificio.
- 16. Tubo Pitot Mide la diferencia entre la presión total y la presión estática, o sea, la presión dinámica, la cual es proporcional al cuadrado de la velocidad. El tubo Pitot es sensible a las variaciones en la distribución de velocidades en la sección de la tubería, por esto es esencial que el flujo sea laminar disponiéndolo en un tramo recto de tubería. Figura 1.20. Tubo Pitot. Donde la ecuación correspondiente es : 2 12 12 VPP += ρρ Turbina Los medidores de turbina consisten en un rotor que gira al paso del fluido con una velocidad directamente proporcional al caudal. La velocidad del fluido ejerce una fuerza de arrastre en el rotor; la diferencia de presiones debido al cambio de área entre el rotor y el cono posterior ejerce una fuerza igual y opuesta. Figura 1.21. Turbina.
- 17. Magnéticos El medidor magnético de caudal, se basa en la ley de Faraday, la que establece que la tensión inducida a través de cualquier conductor, al moverse éste perpendicularmente a través de un campo magnético, es proporcional a la velocidad del conductor. Rotámetros Son medidores de caudal de área variable en los cuales un flotador cambia su posición dentro de un tubo, proporcionalmente al flujo del fluido. Figura 1.22. Rotámetro. Doppler Son medidores que se basan en el efecto Doppler para medir el caudal o flujo. Es apropiado para fluidos aireados o con sólidos suspendidos, tales como aguas residuales,lodos, fangos, etc. 1.3.2. Medidores de nivel. Medidor de presión diferencial Consiste en un diafragma en contacto con el líquido del estanque, que mide la presión hidrostática en un punto del fondo del estanque. En un estanque abierto esta presión es proporcional a la altura del líquido en ese punto y a su peso específico Medidor de capacidad Mide la capacidad del condensador formado por el electrodo sumergido en el líquido y las paredes del estanque. La capacidad del conjunto depende linealmente del nivel del líquido.
- 18. Ultrasónico Se basa en la emisión de un impulso ultrasónico a una superficie reflectante y a la recepción del eco del mismo en un receptor. El retardo en la captación del eco depende del nivel del estanque. Figura 1.23. Medidores de nivel. 1.3.3. Medidores de presión. Tubo Bourdon Es un elemento mecánico que a través de un sistema de palancas, convierte presión en una fuerza o en un desplazamiento mecánico. Figura 1.24. Medidor de tubo Bourdon. Piezoeléctricos Los elementos piezoeléctricos son materiales cristalinos que, al deformarse física- mente por la acción de una presión, generan una señal eléctrica. Dos materiales típicos en los transconductores piezoeléctricos son el cuarzo y el titanio de bario. Figura 1.25. Piezoeléctricos.
- 19. 1.3.4. Medidores de temperatura con contacto. Por Expansión Constan de un depósito que contiene líquido, vapor, gas o mercurio, y que al calentarse se expande sobre una escala que indica la temperatura. Figura 1.26. Medidores por expansión. Resistivos La medida de temperatura utilizando sondas de resistencia depende de las características de resistencia en función de la temperatura que son propias del elemento en detección. Figura 1.27. Sondas de resistencia. 1.3.5. Medidores de temperatura sin contacto. Figura 1.28. Medidores de temperatura sin contacto.
- 20. Pirómetros ópticos Los pirómetros ópticos manuales se basan en la desaparición del filamento de una lámpara al contacto visualmente con la imagen del objeto enfocado. Pueden ser de dos tipos: de corriente variable en la lámpara o de corriente constante en la lámpara con variación del brillo de la imagen de la fuente. Los pirómetros ópticos automáticos consisten escencialmente en un disco rotativo que modula desfasadas la radiación del objeto y la de una lámpara estándar que inciden en un fototubo multiplicador. Pirómetros de radiación Se fundan en la ley de Stefan-Boltzmann, que dice que la intensidad de energía radiante emitida por la superficie de un cuerpo, aumenta proporcionalmente a la cuarta potencia de la temperatura absoluta (Kelvin) del cuerpo. Pirómetros infrarrojos El pirómetro infrarrojo capta la radiación espectral del infrarrojo, invisible al ojo humano, y puede medir temperaturas menores de 700° C, supliendo al pirómetro óptico que sólo puede trabajar a temperaturas superiores a 700° C, donde la radiación emitida es significativa. 1.3.6. Otros sensores usados en la industria. PH En la medida de pH pueden utilizarse varios métodos, entre los cuales los más exactos y versátiles de aplicación industrial son : el sistema de electodo de vidrio y el de transistor. El electrodo de vidrio consiste en un tubo de vidrio cerrado en su parte inferior con una membrana de vidrio especialmente sencible a los iones hidrógeno del pH. El método del transistor es prácticamente irrompible, de estado sólido y proporciona una respuesta muy rápida. El sensor posee una señal de pH de baja impedancia, lo que le da una gran fiabilidad.
- 21. Figura 1.29. Instrumentos para medición de pH. O2 Disuelto, CO2 El sensor de oxígeno disuelto es una célula palarográfica consistente en un cátodo de aleación oro-plata-platino y ánodo plata-cloruro de plata sumergidos en un electrolito de solución de potasa y cloruro potásico en agua. Una fina membrana de teflón permeable a los gases permite la difusión del oxígeno procedente de la muestra de agua. Como para cada molécula de oxígeno que se reduce entran cuatro electrones en la célula y cuatro abandonan el ánodo, se obtiene una corriente eléctrica de cátodo a ánodo que es directamente proporcional a la cantidad de oxígeno que se pasó a través de la membrana. El oxígeno disuelto viene influido por la temperatura, de aquí que sea necesario incorporar al circuito termocompensadores que refieran automáticamente la medida a una temperatura estándar. Figura 1.30. Sensores de oxigeno disuelto. Conductividad La conductividad es la capacidad de una solución acuosa para conducir una corriente eléctrica.
- 22. Figura 1.31. Sensor de conductividad. Humedad !"Humedad en aire y gases En la determinación de la humedad en el aire y en los gases pueden emplearse varios métodos, entre los cuales destacan: • Metodo de elemento de cabello (o nailon) • Bulbo seco y bulbo humedo • Célula de cloruro de litio • Sensor de polímero !"Humedad en sólidos En la determinación de la humedad en sólidos se emplean varios métodos, entre los cuales destacan: • Secado térmico • Metodo de la conductividad • Metodo de capacidad • Metodo de infrarrojos • Metodo de radiación. Figura 1.32. Sensor para detección de humedad.
- 23. 1.4. CLASIFICACIÓN DE INSTRUMENTOS. 1.4.1. En función del Instrumento. • Sin indicación o instrumentos ciegos : Son aquellos que no tienen indicación visible de la variable. Figura 1.33. Instrumento ciego. • Con indicación : Disponen de un índice y una escala graduada en la que puede leerse el valor de la variable. Figura 1.34. Instrumento con indicación. • Registradores : Registran con trazo continuo o a puntos la variable. Figura 1.35. Registradores. • Elementos primarios : Están en contacto con la variable y utilizan o absórven energía del medio controlado para dar al sistema de medición una indicación en respuesta a la variable controlada.
- 24. Figura 1.36. Sensor. • Transmisores : Captan la variable de proceso a través del elemento primario y la transmiten en forma de señal neumática (3 a 15 psi) o eléctrica (4 a 20 mA) de corriente contínua. Figura 1.37. Transmisor. • Transductores : Reciben una señal de entrada en función de una o más cantidades físicas y la convierten a una señal de salida. Un ejemplo muy claro de tranductor es un relé, un elemento primario, un transmisor, etc. • Convertidores : Son aparatos que reciben una señal de entrada neumática o eléctrica procedente de un instrumento y después de modificarla envían otra resultante en forma de señal de salida estándar. Ejemplo: convertidor I/P. • Controladores : Comparan la variable controlada (presión , nivel, temperatura) con un valor deseado y ejercen una acción correctiva. • Elementos finales de Control : Recibe la señal del controlador y modifica el caudal o agente de control. Es el que ejerce la acción del controlador. 1.4.2. En función de la Variable de Medida. • Presión • Temperatura • Flujo • Nivel • Posición
- 25. • Etc. Esta clasificación corresponde específicamente al tipo de las señales medidas, siendo independiente el sistema empleado. Asimismo, esta clasificación es independiente del número y tipo de transductores entre el elemento primario y el instrumento final. Por ejemplo, un transmisor eléctrico de nivel de 4 a 20 mA, un receptor controlador con salida 4 a 20 mA, un convertidor I/P; todos estos, se consideran de nivel.
- 26. 1.5. BIBLIOGRAFÍA. [1].Creus Solé Antonio; Instrumentación Industrial, 6ª edición; Marcombo S.A.; 1997. [2].Creus Solé Antonio; Instrumentos Industriales. Su ajuste y calibración; 2ª edición; Marcombo S.A.