Descargado 785 veces











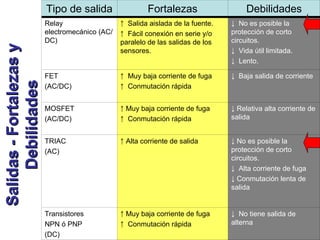


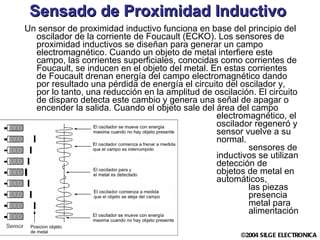
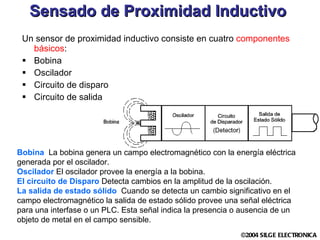
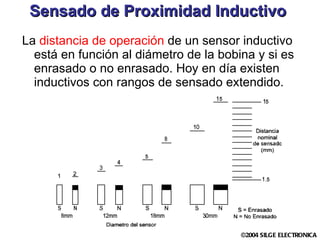



















El documento resume los conceptos básicos de sensado industrial, incluyendo diferentes tipos de tecnología (contacto vs sin contacto), detección (discreta vs analógica), características de los sensores, selección de sensores según la aplicación, y tipos de salidas y alimentación.













































































