Descargar para leer sin conexión



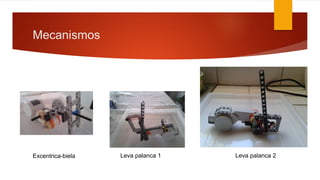

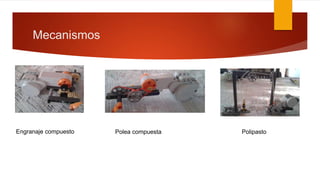

El documento presenta una propuesta educativa sobre robótica educativa para seis grados, detallando mecanismos como correa polea y rueda dentada, junto con sus aplicaciones en la vida real. Cada grado incluye ejemplos de movimientos de entrada y salida y aplicaciones prácticas en objetos como robots, batidores y sistemas de transporte. También se menciona un análisis personal del proceso de construcción, destacando logros y obstáculos enfrentados.



















































































