Descargado 53 veces

![Representación en el espacio (VIII)Programa en Matlab>> porg=[3 4 5 0]'porg = 3 4 5 0>> pb=[-1 3 4 1]'pb = -1 3 4 1>> porg+rpy2tr(pi/6,pi/3,pi/8)*pbans = 6.2810 6.0064 8.3481 1.0000](https://image.slidesharecdn.com/fundposori-110303091526-phpapp02/85/Fundposori-17-320.jpg)
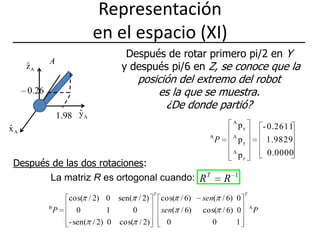
![Representación en el espacio (X) Solución con MATLAB>> pb=[0 2*cos(pi/8) 2*sin(pi/8) 1]‘>> pa=rotz(pi/6)*roty(pi/2)*pbpa =-0.2611 1.9829 0.0000 1.0000](https://image.slidesharecdn.com/fundposori-110303091526-phpapp02/85/Fundposori-19-320.jpg)
![Definición de un cuadro de referencia origen% Se define una matriz % de transformación hogéneaTA=[ 1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1];% Visualización de la matrizframe(TA,'b',1);](https://image.slidesharecdn.com/fundposori-110303091526-phpapp02/85/Fundposori-24-320.jpg)
![Traslación de un sólido en el espacio% Se define matriz de transformación hogéneaTA=[1 0 0 0;0 1 0 0 ;0 0 1 0;0 0 0 1];% Traslación en xyzTB=transl(1,2,3)*TA;](https://image.slidesharecdn.com/fundposori-110303091526-phpapp02/85/Fundposori-25-320.jpg)
![Rotación de un sólido en el espacio% Se define matriz de % transformación hogéneaTA=[1 0 0 0;0 1 0 0 ;0 0 1 0;0 0 0 1];% Rotación en y 45 gradosTB=roty(pi/4)*TA;Matriz rotación](https://image.slidesharecdn.com/fundposori-110303091526-phpapp02/85/Fundposori-26-320.jpg)
![Rotación y traslación de un sólido en el espacio% Rotación en y 45 grados% y traslación xyzTB=transl(1,2,3)*roty(pi/4)*TA;frame(TA,'b',1.5);frame(TB,'r',1.5);axis([-1 3 -1 1 -1 5])](https://image.slidesharecdn.com/fundposori-110303091526-phpapp02/85/Fundposori-27-320.jpg)
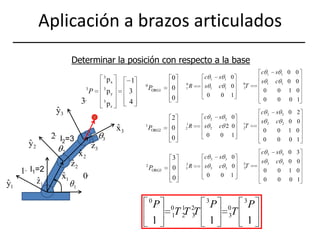
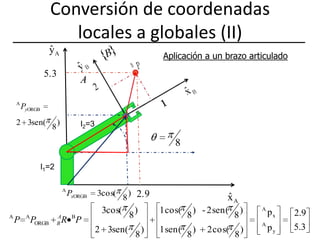
![Aplicación a brazos articulados (II)Solución utilizando Matlab>> P3=[-1 3 4 1]'P3 = -1 3 4 1>> t=[pi/5 -pi/8 -pi/9]'t = 0.6283 -0.3927 -0.3491l2=3>> T01=[cos(t(1,1)) -sin(t(1,1)) 0 0;sin(t(1,1)) cos(t(1,1)) 0 0; 0 0 1 0; 0 0 0 1]>> T12=[cos(t(2,1)) -sin(t(2,1)) 0 2;sin(t(2,1)) cos(t(2,1)) 0 0; 0 0 1 0; 0 0 0 1] >> T23=[cos(t(3,1)) -sin(t(3,1)) 0 3;sin(t(3,1)) cos(t(3,1)) 0 0; 0 0 1 0; 0 0 0 1]>> P0=T01*T12*T23*P3P0 = 3.8812 4.9698 4.0000 1.0000l1=2Compararse con el robot Scara](https://image.slidesharecdn.com/fundposori-110303091526-phpapp02/85/Fundposori-32-320.jpg)
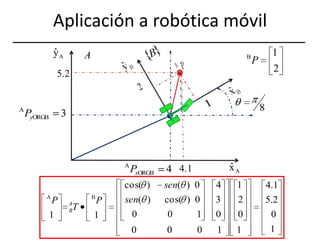
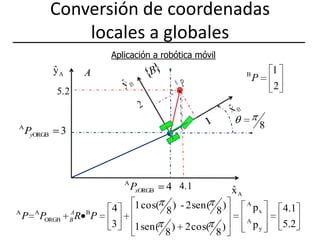
![Aplicación a robótica móvil (II)Solución con MATLAB>> pb=[1 2 0 1]‘>> TBA=[cos(pi/8) -sin(pi/8) 0 4; sin(pi/8) cos(pi/8) 0 3; 0 0 1 0; 0 0 0 1]>> pa=TBA*pbpa= 4.1585 5.2304 0 1.0000](https://image.slidesharecdn.com/fundposori-110303091526-phpapp02/85/Fundposori-34-320.jpg)
![Ángulos de Euler Z-Y-Zecho offdisp('Muestra de Ángulos de Euler Z-Y-Z')clear allTA=[1 0 0 0; 0 1 0 0 ; 0 0 1 0; 0 0 0 1];TB=eul2tr(45,0,0);frame(TA,'b',1);frame(TB,'r',1);](https://image.slidesharecdn.com/fundposori-110303091526-phpapp02/85/Fundposori-36-320.jpg)
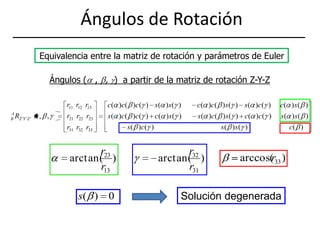

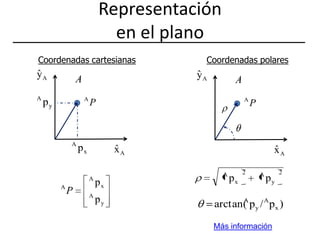
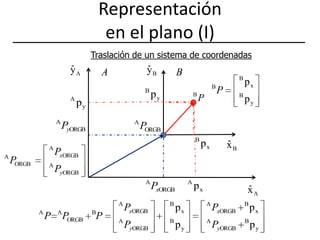
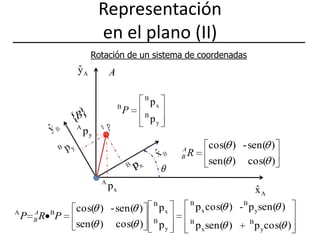
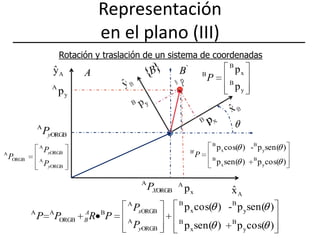
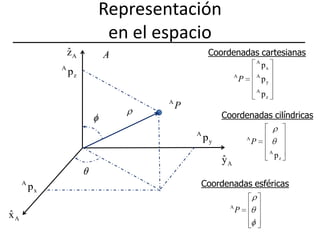
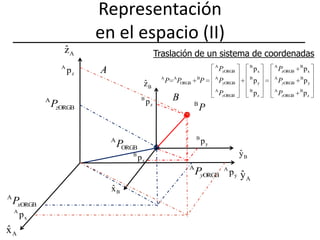
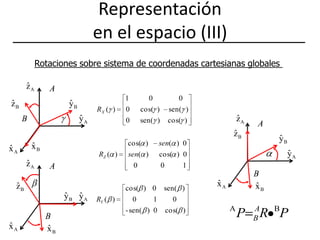
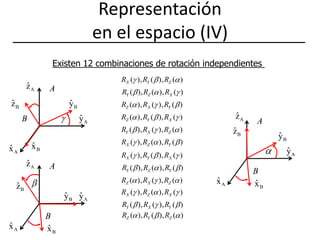
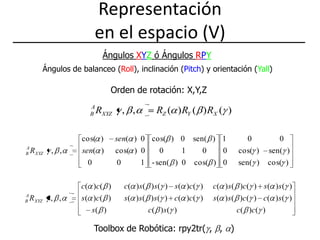
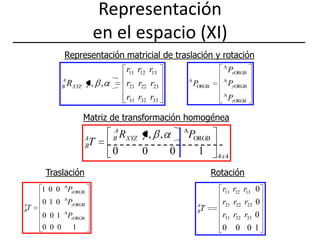
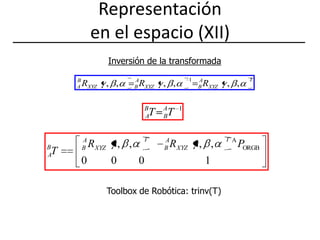
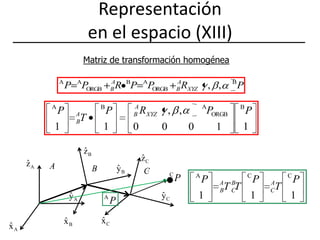
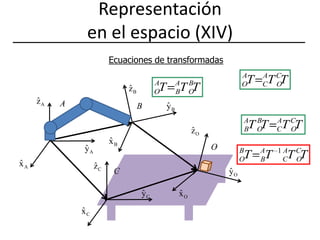
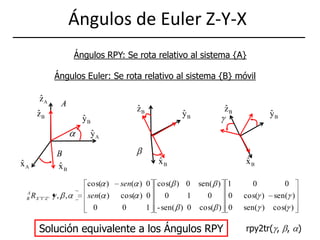
Este documento describe diferentes representaciones de la posición y orientación en el plano y el espacio, incluyendo coordenadas cartesianas, polares, cilíndricas y esféricas. También explica cómo representar traslaciones, rotaciones y combinaciones de ambas mediante matrices de transformación homogénea, y cómo aplicar estos conceptos a robótica móvil y brazos articulados. Finalmente, analiza ángulos de Euler y RPY para representar orientaciones y sus equivalencias con matrices de rotación.




















































































