Descargado 267 veces






















































































![Telegramas (LM 200) Telegrama para verificar conexión con el LIDAR: Status_Chk = uint8([2 0 1 0 49 21 18]); fwrite(s,Status_Chk); Status_Ack = fread(s,161,'uint8'); Telegrama de solicitud de envío de datos: Send_Data = uint8([2 0 2 0 32 36 52 8]); fwrite(s,Send_Data); DataSet = fread(s); Telegrama para detener el envío de datos: Stop_Data = uint8([2 0 2 0 32 37 53 8]); fwrite(s,Stop_Data); StopData_Ack = fread(s,10,'uint8'); Fuente : Olin Robotics](https://image.slidesharecdn.com/hardwaresensores-090930060342-phpapp02/75/Sensores-de-robots-88-2048.jpg)























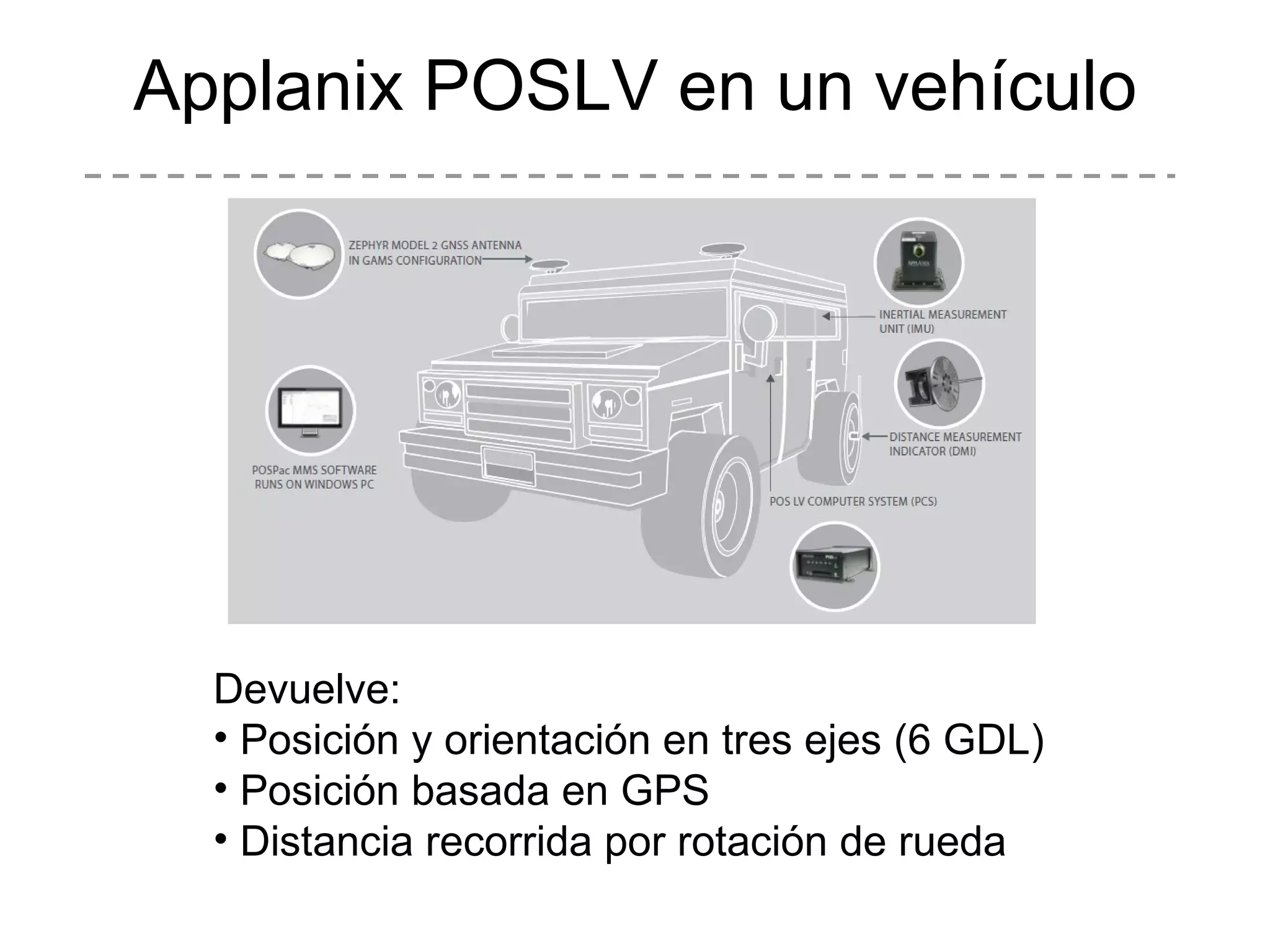
El documento describe diferentes tipos de sensores y sistemas de comunicación que se pueden usar en robots. Incluye detalles sobre sensores como cámaras, LIDAR, ultrasonido, infrarrojos, GPS, acelerómetros, giróscopos y más. También cubre temas como comunicaciones inalámbricas, sistemas de navegación inercial y fusiones de sensores.



































































