Ejemplos de modelos basados en adaptacion parametrica
•
0 recomendaciones•1,332 vistas

Este documento describe seis plantas no lineales multivariables, incluyendo modelos de entrada-salida. También describe un modelo de adaptación paramétrica basado en lógica borrosa que utiliza redes neuronales para identificar sistemas dinámicos y controlarlos. El modelo de adaptación puede seleccionar diferentes tipos de consecuentes, usar un factor de aprendizaje variable y identificar múltiples salidas simultáneamente.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (19)
Similar a Ejemplos de modelos basados en adaptacion parametrica
Similar a Ejemplos de modelos basados en adaptacion parametrica (20)
Más de Omar Sanchez
Más de Omar Sanchez (20)
Último
Último (20)
Ejemplos de modelos basados en adaptacion parametrica
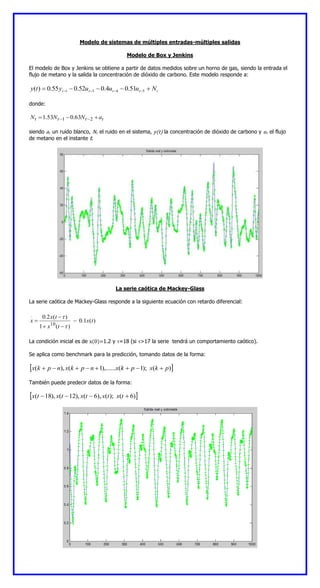
- 1. Modelo de sistemas de múltiples entradas-múltiples salidas Modelo de Box y Jenkins El modelo de Box y Jenkins se obtiene a partir de datos medidos sobre un horno de gas, siendo la entrada el flujo de metano y la salida la concentración de dióxido de carbono. Este modelo responde a: ttttt Nuuuyty 5431 51.04.052.055.0)( donde: tttt aNNN 21 63.053.1 siendo at un ruido blanco, Nt el ruido en el sistema, y(t) la concentración de dióxido de carbono y ut el flujo de metano en el instante t. La serie caótica de Mackey-Glass La serie caótica de Mackey-Glass responde a la siguiente ecuación con retardo diferencial: )(1.0 )(1 )(2.0 10 . tx tx tx x La condición inicial es de x(0)=1.2 y =18 (si >17 la serie tendrá un comportamiento caótico). Se aplica como benchmark para la predicción, tomando datos de la forma: )();1(),......1(),( pkxpkxnpkxnpkx También puede predecir datos de la forma: )6();(),6(),12(),18( txtxtxtxtx
- 2. Plantas generales Planta 1: La salida del sistema no lineal responde a: )1()2(1 )()1)2()(1()2()1()( )1( 22 kyky kukykukykyky ky La señal generada por el controlador sobre la planta cambia a partir de las 500 iteraciones de acuerdo a: 500>kpara)25/2sin(2.0)250/2sin(8.0 500kpara)250/2sin( )( kk k ku Una señal de control alternativa puede estar definida por: 0010k600parak/8.5))0.603sen(k/22)0.1sen(k/15)0.3sen( 600k400para1 400k200para1 200kpara)15/( )( sen ku Planta 2: La salida del sistema no lineal responde a: )( ))1()(1( )5.2)()(1()( )1( 22 ku kyky kykyky ky La señal de control o estímulo responde a: )25/2sin( ku
- 3. Planta 3: La salida del sistema no lineal multivariable responde a: )( )( )(1 )()( )(1 )( )1( )1( 2 1 2 2 21 2 2 1 2 1 ku ku ky kyky ky ky ky ky La señal de control responde a: )25/2cos()( )25/2()( 2 1 kku ksenku
- 4. Planta 4: La salida del sistema no lineal multivariable responde a: )(2 )]()()(8.0[ )1( 2 2 2 2 1 3 1 1 ky kukuky ky )(1 )]8.0)()(5.0)1(()()()([ )1( 2 2 21211 2 ky kukukykyky ky La señal de control responde a: )250/2cos()( )250/2()( 2 1 kku ksenku
- 5. Planta 5: La salida de la planta de segundo orden responde a: ]))()((1[ )]()([ 2)(*1.0)1( 2 2 2 11 kukx kukx kxkx )]()(1[ )( 2)()(*1.0)1( 2 1 2 2 2 22 kxkx ku kukxkx )()()( 21 kxkxky La señal de control responde a: )25/2()10/2()( ksenksenku Planta 6: La salida de la planta responde a: ))(sin( )(1 )( )( 212 1 1 1 txp tx tx Tstx ))()(cos()(1 )( )())(cos()()( 123 2 3)()( 1222 2 2 2 2 1 txtxptu tu etxtxtxTstx p txtx ))((1 )( ))((1 )( )( 15 2 24 1 txsenp tx txsenp tx ty La señal de control responde a: )25/2()10/2()( tsentsenku
- 6. Características del modelo de adaptación paramétrica Sistema lógico borroso basado en campanas de Gauss caracterizado por: 1.- Selección del tipo de consecuente: a) Singleton b) Takagi-Sugeno-Kang (TSK) c) TSK con término afín 2.- Factor de aprendizaje variable (dependiente del error) 3.- Identificación simultánea de múltiples salidas 4.- Posibilidad de seleccionar normalización-denormalización de variables 5.- Representación de las funciones de pertenencia de la parte precedente de reglas Referencias: [1] Narendra, K.; Parthasarathy.: "Identification and Control of Dynamical Systems Using Neural Netwroks".IEEE Trans. on Neural Networks, vol. 1, No. 1. 1990. [2] Nie, J.: "Constructing Fuzzy Model by Self-Organizing Counterpropagation Network". IEEE Trans. on Systems, Man, and Cybernetics, Vol. 25, No. 6. pp. 963-970. 1995. [3] Narendra, K.; Mukhopadhyay, S.: "Adaptive Control Using Neural Networks and Approximate Models".IEEE Trans on Neural Networks. Vol. 8. No. 3. pp. 475-485. 1997. [4] Narendra, K.; Li, S.: "Neural networks in control systems". Mathematical Perspectives on Neural Networks. pp. 347-394. Lawrence Erlbaum Associates. 1996.