Descargado 24 veces







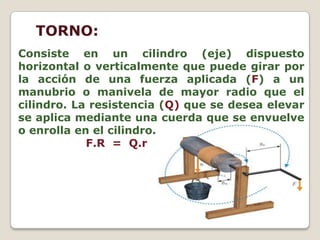














Este documento describe las máquinas simples, incluyendo su definición, tipos y propiedades. Las máquinas simples son dispositivos mecánicos que facilitan el trabajo al multiplicar la fuerza aplicada. Las principales máquinas simples descritas son la palanca, el plano inclinado, el tornillo, los engranajes y las poleas. Para cada máquina, se explica brevemente su funcionamiento y la relación entre la fuerza aplicada y la resistencia vencida.





























































































