Descargado 253 veces

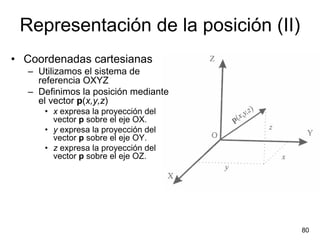
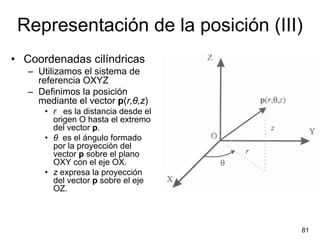
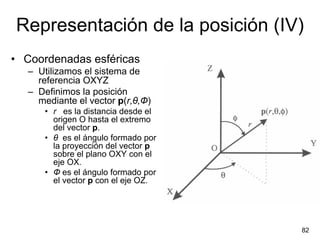
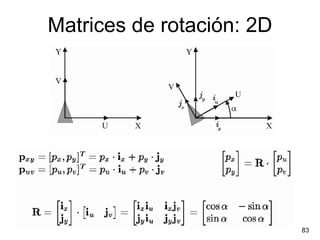

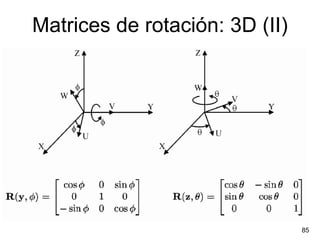
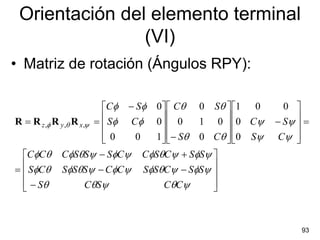

Este documento trata sobre geometría, cinemática y dinámica. Explica diferentes tipos de coordenadas y matrices de rotación para representar la posición y orientación de un robot. También cubre conceptos como el problema cinemático directo e inverso, así como las ecuaciones de Newton-Euler y Lagrange-Euler para la dinámica.



































































