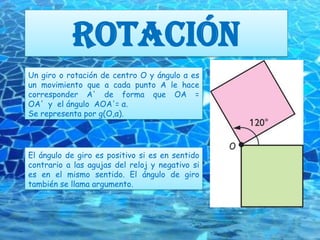
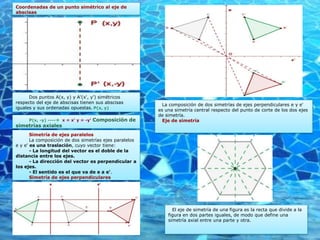
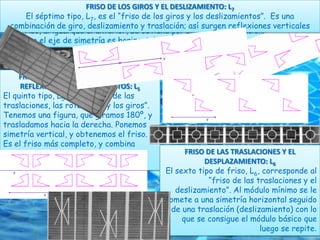
Este documento describe diferentes tipos de movimientos geométricos como traslaciones, giros, simetrías y sus aplicaciones en frisos y mosaicos. Explica que los frisos se forman mediante la aplicación repetida de traslaciones, giros, simetrías axiales y deslizamientos a figuras base. También describe siete tipos de frisos (L1-L7) y define los mosaicos como conjuntos de figuras que recubren el plano mediante traslaciones sin superposición ni huecos.





















































![Transformaciones recurso por blog [modo de compatibilidad]](https://cdn.slidesharecdn.com/ss_thumbnails/transformacionesrecursoporblogmododecompatibilidad-120529094414-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





























