Descargar para leer sin conexión


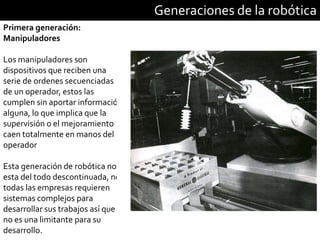
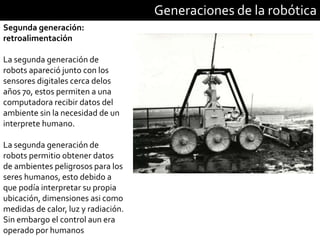
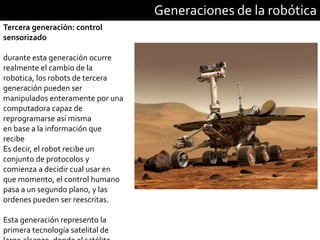
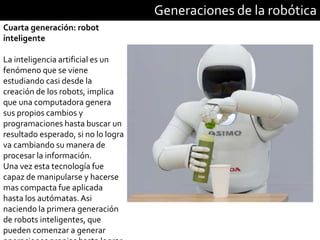

El documento describe las cuatro generaciones de robótica. La primera generación consistió en manipuladores controlados por humanos. La segunda generación introdujo sensores que permitieron a los robots recibir retroalimentación del ambiente. La tercera generación podía controlarse completamente por computadora con capacidad de reprogramarse. La cuarta generación representa robots inteligentes capaces de generar sus propios cambios y programaciones.



























































































