Descargado 167 veces

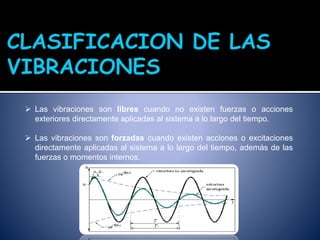
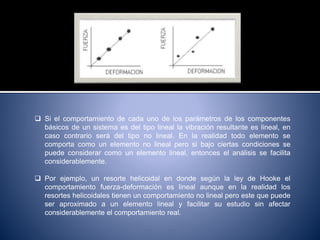
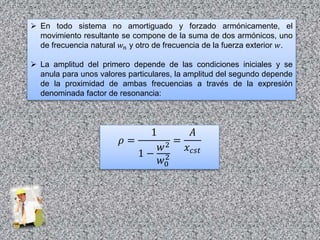
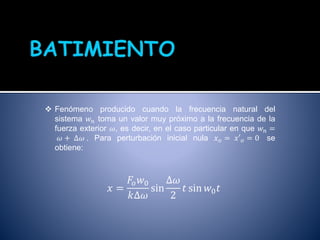
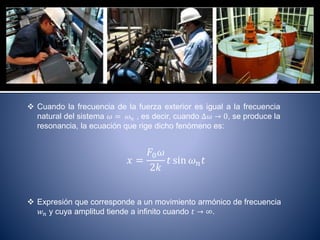


El documento describe las vibraciones mecánicas. Explica que las vibraciones son oscilaciones alternativas alrededor de una posición de equilibrio. Las vibraciones pueden ser libres o forzadas dependiendo de si hay una fuerza externa aplicada. También cubre la clasificación de las vibraciones, la ecuación diferencial que las describe, y el fenómeno de resonancia que ocurre cuando la frecuencia forzada es igual a la frecuencia natural del sistema.
![Vibraciones unidad 1 c [autoguardado]](https://cdn.slidesharecdn.com/ss_thumbnails/vibracionesunidad1cautoguardado-160130180638-thumbnail.jpg?width=640&height=640&fit=bounds)






![Vibraciones unidad 1 b [sistema de resortes]](https://cdn.slidesharecdn.com/ss_thumbnails/vibracionesunidad1bautoguardado-160123184358-thumbnail.jpg?width=640&height=640&fit=bounds)















































































