2. Modelado de sistemas dinámicos
ny
aijy(k j + 1)
j=1
nu
biju(k j + 1) + ci
j=1
Modelo con regresión no lineal:
y(k+1) = F[y(k), . . . , y(k ny + 1), u(k), . . . , u(k nu + 1)]
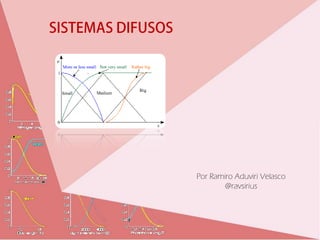
En forma de regla (ejemplo modelo de Takagi-Sugeno):
si y(k) es pequeño y u(k) es pequeño
entonces y(k+1) =
3. Paradigmas en el modelado
• Mecánico (caja blanca, físico)
• Cualitativo (remedios ingenuos,
basados en el conocimiento)
• Conducido por datos (caja negra,
inductivo)
Combinación de estos enfoques:
modelado con caja gris
Parametrización de modelos no lineales
• polinomiales, estrías
• tablas de consulta
• sistemas difusos
• redes neuronales
• redes de función con base radial
• redes wavelet
• ....
Construcción de modelos difusos
Planteamiento en base al conocimiento:
• conocimiento del experto reglas y funciones de
membresía
• modelo difuso del operador humano o un proceso
• interpretación linguística
Planteamiento conducido por datos:
• representación no lineal, aproximación universal
• extracción de reglas y funciones de membresía de los
datos
Estructura y parámetros
Estructura:
• Variables de entrada y de salida. Para sistemas dinámicos también
la representación de la dinámica
• Número de funciones de membresía por variable, tipo de
funciones de membresía, cantidad de reglas.
Parámetros:
• Parámetros del consecuente (mínimos cuadrados)
• Funciones de membresía del antecedente (varios métodos)
4. Modelo difuso con singleton
Ri : si x es Ai entonces y = bi, i = 1, 2, . . . , K
Caso especial tanto del modelo linguístico como del modelo de Takagi-Sugeno.
Inferencia / defuzzificación: promedio difuso
K
ibi
i=1
y =
K
i
i=1
El modelo singleton es una expansión de la función base:
K i
y = i(x)bi, i =
i=1 K
j
j=1
Tiene las mismas propiedades que las redes de funciones con base radial,
modelos spline:
• propiedades de aproximación universal
• estimación de parámetros sencillo
6. Representación lineal con un modelo singleton
p
y = k`x + q = kixi + q
i=1
• Partición truiangular
• Producto utilizado para el operador AND del antecedente.
i = Ai,1(x1) Ai,1(x2) . . . Ai,p(xp)
• Los singletones del consecuente son iguales a:
p
bi = kjai,j + q
j=1
7. Estimación por mínimos cuadrados de Singletons
Ri : si x1 es Ai1 y . . . y xp es Aip entonces y = bi
• Dado Aij y un conjunto de datos de entrada y salida: Z = {xk, yk I k = 1, 2, . . ., N}
• Estimación de los parámetros del consecuente optimos bi
1. Calcule el grado de compromiso i(xk) = Ai1(x1k) Ai2(x2k) . . . Aip(xpk)
2. Normalice: i(xk)
ki =
K
j(xk)
j=1
La salida es una combinación lineal convexa de entradas:
K
y = kibi, o y = b
i=1
3. Estimación por mínimos cuadrados:
b = [T]-1Ty
8. Modelo difuso de Takagi-Sugeno (TS)
Ri : si x es Ai entonces yi = aT
ix + bi, i = 1, 2, . . . , K
• Funciones de membresía multi variables:
Ai(x) : p [0, 1]
• Antecedente de la regla en forma conjuntiva:
i : si x1 es Ai1 y . . . y xp es Aip entonces . . .
• Salida del modelo dado por el promedio difuso ponderado:
K
i=1 Ai(x)yi K
i=1Ai(x)(aT
ix + bi)
y = =
K
i=1Ai(x) K
i=1Ai(x)
10. El modelo TS es un sistema Cuasilineal
K
i=1Ai(x)yi K
i=1Ai(x)(aT
ix + bi)
y = =
K
j=1Aj(x) K
j=1Aj(x)
con:
Ai(x)
i(x) =
K
j=1Aj(x)
se obtiene:
o:
y = a(x)x + b(x)
11. Estimación por mínimos cuadrados de los consecuentes
i = [aT
i bi]T, Xe = [X 1]
i = 1, 2, . . . , K
• LS global:
´ = [(X´)TX´]-1(X´)Ty
con
X´ = [W1Xe W2Xe . . . WKXe]
y
• LS local:
i = [(Xe)TWiXe]-1(Xe)TWiy
12. Funciones de membresía del antecedente
• Plantillas (partición en rejillas)
• Optimización no lineal (métodos neuro-difusos)
• Contrucción libre
• Agrupamiento (clustering) difusa en el espacio producto
Modelado basado en plantilla
• Determine la función de membresía
a priori (forma y cantidad).
• Solo para problemas pequeños
(1 a 3 entradas).
K = p
i=1Ni
14. Agrupamiento difuso: vía optimización
Función objetivo (criterio con mínimos cuadrados):
c N
J(Z; V, U, A) = m
i,jd2
Ai(zj, vi)
i=1 j=1
sujeto a restricciones:
0 ij 1 j = 1, . . . , N gradio de membresía
i = 1, . . . , c
0 N
j=1i,j 1 i = 1, . . . , c sin grupo
c
j=1i,j = 1 j = 1, . . . , N membresía total
15. Algoritmos de agrupamiento difusos
Dado los datos
zk = [z1k, z2k, . . . , zNk]T n, k = 1, . . . , N
Encuentre:
la matriz de partición:
y los centros del grupo:
V = {v1, v2, . . . , vc}, vi n
16. Algoritmo difuso con c promedios
Repita:
1. Calcule de prototipos de grupo (promedios):
N
k=1m
i,kzk
vi =
N
k=1m
i,k
2. Calcule las distancias:
di,k = (zk vi)T(zk vi)
3. Actualice la matriz de partición:
1
i,k =
c
j=1(dik/djk)1/(m-1)
hasta que IIUII <
17. Mediciones de distancia
• Norma Euclideana:
d2(zj, vi) = (zj vi)T(zj vi)
• Norma producto interno:
d2
Ai(zj, vi) = (zj vi)T(zj vi)
• y muchas otras posibilidades ...
Agrupamiento difuso:
Algoritmo con c promedios
Modelos de Mamdani: Agrupamiento
difuso con c promedios
18. Algoritmo de Gustafson-Kessel (GK)
Repite:
1. Calcula prototipos del grupo (promedios):
N
m
i,kzk
k=1
vi =
N
m
i,k
k=1
2. Calcula las matrices de covarianza del grupo:
N
m
i,k(zk vi)T(zk vi)
k=1
Fi =
N
m
i,k
k=1
3. Calcula las distancias:
dik = (zk vi)T[idet(Fi)1/nF-1
x] (zk vi)
4. Actualiza la matriz de partición
1
ik =
c
(dik/djk)1/(m-1)
j=1
hasta IIUII<
20. Ejemplo: Control de presión
Dinámicas de presión:
R : constante del gas (8.134 J mol-1K-1),
T : temperatura (305 K),
Vh : volumen del gas (0.015 m3),
g : razón de flujo del gas (3.75 x 10-4m3s-1),
RH : radio del tubo de salida (0.0178 m),
Po : presión de referencia (1.013 x 105 N m-2),
o : densidad del aire externo (1.2 Kg m-3),
P : presión en el tanque (N m-2),
Kf : factor de fricción de la válvula (J mol -1).
21. Modelo Fuzzy de Takagi-Sugeno
Reglas:
1. si y(k) es BAJO y u(k) esta ABIERTO
entonces y(k+1) = 0.67y(k) + 0.0007u(k) + 0.35
2. si y(k) es MEDIO y u(k-1) esta MEDIO CERRADO
entonces y(k+1) = 0.80y(k) + 0.0028u(k) + 0.07
3. si y(k) es ALTO y u(k-1) esta CERRADO
entonces y(k+1) = 0.90y(k) + 0.0071u(k) + 0.39.
23. Redundancia en modelos difusos
Transparencia no se la obtiene de forma automática
• Adquisición de información asegura transparencia.
• Basado en los datos: alguna redundancia es inevitable.
Redundancia se manifiesta en dos formas:
• Gran número de reglas. Acuerdo entre:
exactitud del modelo / complejidad del modelo
capacidad en la generalización / aproximación de datos
• Conjuntos difusos muy similares
similitud entre conjuntos
similitud al conjunto difuso universal
Gran cantidad de reglas, solapamiento de conjuntos difusos similares
• Complejidad innecesaria
• Dificultad en la asignación de rótulos linguísticos
• Menos transparencia y generalidad
24. Redundancia en modelos difusos
Adaptación de parámetros
• Cantidad de conjuntos difusos por variable
• Migración de conjuntos difusos debido a la optimización.
25. Agrupamiento difuso
• Cantidad de grupos
• Proyección de grupos sobre las
variables del antecedente
Agrupamiento difuso supervisado
• Comienza con una cantidad
sobrestimada de grupos
• Elimina a quellos que no influyen
cuando se procede al agrupamiento
26. Mediciones de similitud
A B
S(A, B) =
A B
Fusionamiento de conjuntos similares
• Entrega un término generalizador
• Fusiona agregando los parámetros de cada
conjunto
27. Simplificación y reducción
Ejemplo: Crecimiento de algas
Predicción de concentración de clorofila-a en los
ecosistemas de laguna
998 observaciones de nueve diferentes lagos
Entradas: temperatura, N, P, Si, duración del día,
intensidad de luz
Salidas: Concentración de clorofila-a
Modelos de Takagi-Sugeno
Si T es AT, N es AN, P es AP, Si es ASi, D AD y I es AI
Entonces Chl = po + p1T + p2N + p3P + p4Si + p5D + p6Ih
Método: Agrupamiento difuso y análisi de similitud
29. Base de reglas simplicado
Temp N P Día Luz
(verano) R1 Si Caliente Alto Mod. Entonces ...
(invierno) R2 Si Frío Bajo Corto Bajo Entonces ...
(excepción) R3 Si Caliente Bajo Bajo Alto Entonces ...
(verano) R4 Si Caliente Alto Bajo Entonces ...
(invierno) R5 Si Frío Mod. Corto Bajo Entonces ...
30. Control difuso: Fundamentos
• controlador diseñado utilizando reglas Si-Entonces en lugar de fórmulas
matemáticas (control basado en el conocimiento)
• motivación de incio: operadores con experiencia fingida
• razonamiento difuso: interpolación entre salidas discretas
• generalmente: también controladores diseñados sobre la base de un modelo
difuso (control difuso basado en el modelo)
• un controlador difuso representa una transformación no lineal (pero
completamente determinístico!)
1965 Primera publicación sobre conjuntos difusos (Zadeh)
1974 Control difuso aplicado a un sistema de laboratorio (Mamdani)
1982 Primera aplicación industrial del control difuso (a un horno de cemento)
1985 Control de tren vía Sendai, productos de consumo (Japón)
31. Esquemas básicos de control difuso
Control difuso directo (nivel bajo de Mamdani)
Control supervisor difuso (nivel alto, Takagi-Sugeno)
Control basado en el modelo difuso
33. Control proporcional difuso: Reglas
Si el error es Negativo Grande entonces la entrada de control es Negativo Grande
Si el error es Cero entonces la entrada de control es Cero
Si el error es Positivo Grande entonces la entrada de control es Positivo Grande
Transformación de
entrada-salida del
controlador
34. Ejemplo: Compensación a la fricción
1. Motor DC con fricción estática
2. Reglas difusas para representar al control proporciona “normal”
3. Reglas adicionales para prevenir estados indeseables.
Modelo del motor DC
36. Base de reglas para el control difuso
Reglas para el proporcional:
• Si el error es Positivo Grande entonces entrada de control es Positivo Grande
• Si el error es Negativo Grande entonces entrada de control es Negativo Grande
• Si el error es Cero entonces entrada de control es Cero
Reglas adicionales:
• Si el error es Negativo Peq. entonces entrada de control no es Negativo Peq.
• Si el error es Positivo Peq. entonces entrada de control no es Positivo Peq.
39. Controlador PD difuso: Tabla de reglas
R12 : Si el error es NB y la derivada del error es ZE entonces control es NB
derivada del error
NB ZE PB
error NB NB NB ZE
ZE NB ZE PB
PB ZE PB PB
40. Control difuso: Etapas en el diseño
Planteamiento de la ingeniería de control + concoimiento heurístico
1. Se determina las entradas y las salidas.
2. Se definen las funciones de membresía
3. Se diseña la base de reglas
4. Se lo prueba (perfectibilidad, estabilidad, desempeño)
5. Se afina el controlador.
41. Control difuso supervisor
Si salida del proceso es Alto entonces se reduce la ganancia proporcional
ligeramente y se incremente la ganancia derivativa moderadamente.
![Modelado de sistemas dinámicos
ny
aijy(k j + 1)
j=1
nu
biju(k j + 1) + ci
j=1
Modelo con regresión no lineal:
y(k+1) = F[y(k), . . . , y(k ny + 1), u(k), . . . , u(k nu + 1)]
En forma de regla (ejemplo modelo de Takagi-Sugeno):
si y(k) es pequeño y u(k) es pequeño
entonces y(k+1) =](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)