TEMA 2 PRINCIPIOS DEL DERECHO LABORAL EN LA CONSTITUCION POLITICA DEL ESTADO
40 -2_capi_2
1. SEGUNDA PARTE
2. FUNCIONES DE TRANSFERENCIA
2.1 Sistemas lineales
•
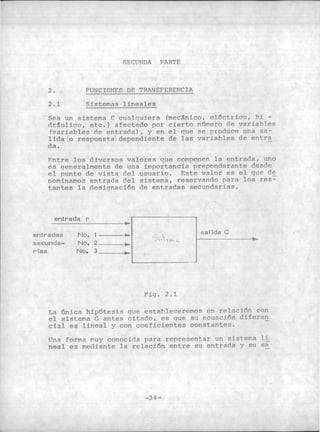
Sea un sistema G cualquiera (mecánico, e1~ctrico, hi -
dráu1ico, etc.) afectado por cierto número de variables
(variables de entrada), y en el que se produce una sa-
lida o respuesta) dependiente de las variables de entra
da.
Entre los diversos valores que componen la entrada, uno
es generalmente de una importancia preponderante desde
el punto de vista del usuario. Este valor es el que de
nominamos entrada del sistema, reservando para los res-
tantes la designaci6n de entradas secundarias.
entrada r
..
entradas No. 1 .. ~t
sal ida e
secunda- No. 2
••
rlas
.
No. 3
•
Fig. 2.1
La única hipótesis que estableceremos en relación con
el sistema G antes citado, es que su ecuaci6n diferen
cia1 es lineal y con coeficientes constantes.
Una forma MUy conocida para representar un sistema 1i
nea1 es mediante la re1aci6n entre su entrada y su sa
-24-
2. b
o
+
n-l
d c(t)
dt
n
- 1 + e .. o + a 1
n-
+ e.,. + b 1
m-
+ b r
m (1)
donde c(t) es la variable de salida y r(t) es la varia
ble de entrada y tOdas las "a" y "b" son constantes.
La ecuaci6n diferencial (2.1) da una representaci6n co~
pleta del comportamiento del sistema ,entre la entrada y
la salida.
Una vez especificada la entrada y las cond1ciones inicia
les, la respuesta se obtiene ,resolviendo la Ecuac16n ¿.1
Sin embargo, es evidente que la representaci6n de un si~
tema por su ecuaci6n diterencial es bastante engorrosa y
poco pr~ctica. ' '
ES posible simplificar la representaci6n de los sistemas
lineales introduciendo la noci6n de "funci6n de transfe-
rencia ll
•
:. ~~
Transformando porfrL~place los dos miembros de la ecuaci6n
¿.1 y suponiendo nulas las condiciones iniciales, tenemos:
-
,-
n-l
s + ... e + a
n-l
,-
m-l
s + e e e + b 1 s + b" ) R( )
m- m s
-25-
--
(2.1)
(20 2)
3. Por definición, la funclón de transferencia de un Sis-
tema es el cociente entre C(s) y R(s); por lo tanto:
=
r Las caracterIsticas de un sistema lineal dependen unic~
mente de las propiedades de los elementos del sistema,
por esto la función de transferencia G(s) es una propie
dad exclusiva de los elementos del sistema, siendo in -
l dependiente de la entrada y de las condiciones iniciales .
~ Debe destacarse que la función de transferencia no est~
definida para sistenns no lineales, aunque pueden defi-
nirse, con ciertas aproximaciones,lIfunciones de trans -
ferencia pseudolineales ll
para tipos particulares de no
linealidades.
En los problemas de an~lisis, se conoce la función de -
transferencia del sistema y la transformada de la sali-
da puede deducirse por la ecuación:
•
C{s} - G{s} R {s}
•
La respuesta temporal de la salida se obtiene calculan-
do la transformada de Laplace inversa de C(s).
Debe destacarse que el concepto de función de transfere~
cia de un sistema lineal, como se ha definido en la ecua
ción (2.3) es ANALOGO al de ganancia de un amplificador-
electrónico.
A
e
s_ , S 1
- e
e
-26-
( 2.3)
(2.5)
4. donde es es la tensi6n de salida, ee la de entrada y A
es la ganancia en tensi6n del amplificador.
El siguiente ejemplo se propone para ilustrar como se
deducen las funciones de transferencia de un sistema
lineal de variable única •
é (t)
e
•
•
-
R
i(t)
+
e (t)
s
.... ./ C~I
0------------------------____________~_
Fig. 2.2 Red RLC en serie ,
EjemplO 2.1:
La ecuaci6n de
gura 2.2 es:
malla del circuito RLC serie de la fi-
. d "lt)
e (t) = R i(t) + L l
e d t
, -
•
+1
e
o
t
+i( t) d t + e (O )
s
+donde es (O les la tensi6n inicial entre las arma.duras
del condensador C.
Transformando por Laplace los dos miembros de la Ec --
(2.6) Y suponiendo nulas las condiciones iniciales, te
nemos: , • f ' " ••
E (s)· = (R + L S + 1 ) l( s )
e es
•, •
-27-
{2.6)
(2.7)
5. tom~mrlo
f '6.: U!1C 1. !l
I(s)
E (s)
•
la corriente i(t) cerno variable
de trRnsf~renciQ entr e Bc(~) e
1 es
= =
de s2.lic.a,
i(i· ) ~St
R+LS+ 1
es 1 + R e s + L e s2
la
Si se consiaera la tensiOn E(s) (t) como salida, la fun
ciOn de transferencia entre ~e y ~s se obtiene susti =
tuyendo:
1
E (s) =
s
I(s)
e s
en lA ecuac1.0n ¿.J, por lo tanto:
E (s) 1
s = 1
E (s) 1 + R e s + L e s2
e
~.~ Ecuaciones aiferenciales ae alqunos sistemas.
~.~.l
meca.nicos--- ..
Mo~imientb L1.neal (figura ~.2) de una masa so-
metida a una tuerza
m - masa-
x
••
F = fuerza
F r1"1 v
.. .. aceleraci6n.... .... a --
a ..
velocidad.. v ::
X - destllazamiento-
-28-
(2.8)
(2.9)
(2. 10)
.
•
•
··
.
I
6. ¡
La ecuaci6n fundamental de la rnec~nica dice que:
F=m.a
'.
donde la aceleraci6n "a" es la pr1mera derivada, respec
to al tiempo de la velocidad "v" y la segunda derivada,
siempre respecto. al tiempo del desplazamiento X
d v d
2
x
a = dt =.d t2
La ecuaci6n diferencial que describe la manera de compor
tarse la masa (fig. 2.2) "m" a la que se le aplica una -
fuerza P viene .qada por la expresi6n:
2.2.2
d
2
x_.
dt
2
F = m
Movimiento rectilIneo en Eresencia de un sistema
el~stico
•
FI K
.
F
• m
x
--------------~
• Pig. 2.3
Est~ caracterizado por un~ fuerza p' de .sentido contrario
a P, desarrollada por el sistema el~stico. El valor de -
pI depende de las caracterIsticas mecánicas del resorte
(muelle) y del desplazamiento X.
-
•
(2.12)
,
(2. 13)
•
7. FI = K • x donde K = constante. el~sti
ca.
La condici6n de equilibrio din&mico se tendr! cuando -
F - F' = m.a de donde:
F = m. a + F' = m + K • x
2.2.3 Movlmlento rectiflneo en presencia de un roza-
miento de tipo viscoso
F"
f
F
m
x
Fig. 2.4
Este movimiento se caracteriza por una fuerza F" de -
sentido contrario? F, cuyo valor depende de la velo -
cidad y del medio viscoso en el cual la masa se despl~
za:
F" = f • v donde f = coeficiente del medio vis
-coso y
v = velocidad de la m.sa
-30-
(2.14)
(20 1S)
•
(2.16)
•
8. la ecuación diferencial ser~, por tanto, como se ha vis
to en el caso anterior!
F=m. a+FII =m +f. V=m
dx
2.2.4
d t
Movimiento rectilfneo en presencia de un sis -
tema el~stico y de un rozamiento de tipo vis -
coso.
- .
K
FI
F
V.. m FII
..
x
Fig. 2.5
F.ste movimiento esta caracterizado por una fuerza F" de
tipo viscoso y una fuerza F' de tipo el~stico.
Se tendr~ por tanto:
de donde
F ... FI=m. a+FII
d
2
x
F-K X=m .~
• d t
+ f d,x
d t
En lJeneral se puede conclu!r c'Jiciendo que la suma de las
fuerzas aplicadas es equilibrada por la suma de las fuer
zas de inercia (m dV/dt) con las de rozamiento viscoso.-
(f.v.)
-31-
(2. 17)
.
(2.18)
9. ¿.¿.~ Movlmlento Clrcuiar
Ai estudlar el rnOVlmlento clrcuiar y comparario con ei
rectlilneo se puede pasar dei uno ai otro haClendo ai-
gunas sustltucl0nes.
La tuerza F (tuerza motrlz) se sustltuye por el. par "c"
(producto ae loa fuerza "F" por ei brazo de aCC10n): loa
masa se sustltuye por ei mOMento de lnerCla "1": loa ve
-iocldad "V" se sustltuye por loa veiocldaa anCjul.ar "ú)";
ei despiazamlento "X" se sustltuye por ei deSpl.aZamlen
to angul.ar .. g " -
~
_ - - - - - - -- - - ._ _ ,. I ,_~. _ __
- - - ---
e w
Flg. 2.6
teniendo en cuenta lo dicho para el movimiento recti11neo
se puede an4logame~te expresar el movimiento circular.
e = I
dw
dt
Si se quiere sustituir la velocidad por el ángulo recorri
do se tendrá:
2.2.6 Movimiento circular en Eresencia de un rozamien-
to viscoso y un par antagonista de tipo el~stico
d2 G
Al par motr1z e lo equilibran, además del término 1 = dt 2
como en 2.2.5 el par elástico e' = K e y el par de roza-
-32-
(2. 19)
(2.20)
10. miento e" - f
de
dt
c= d t
2.2.6.1 Analogía entre las magnitudes mecánicas y las-
magnitudes eléctricas.
Al tratar las magnitudes mecánicas como eléctricas se -
simplifican en el estudio de los sistemas mecánicos.
Se debe notar que la analogía es puramente formal, es -
decir, debida a las semejanzas entre las fórmulas de -
ambos sistemas.
La analogía permite traducir el sistema mecánico a eléc
-trico. Este se resuelve con las reglas de electrotec -
nia y después se vuelve al sistema mecánico.
Las analogías de la tabla sirven para los sistemas mecá
nicos de traslación y de rotación.
r-------------..,----------- - ...-------------;Magnitudes Mecáni
cas para los sis-
temas Rectilíneos
•
Fuerza F
Velocidad V
desplazam. X
masa M
elastic. S=1/K
coeficiente
de rozam.
viscoso f
Magnitudes Mecán!
cas para los sis-
temas de Rotación
Par e
Veloc.Angl. W
desplaz.Angl. G
moment.inerc. 1
mód.de torso K
rozamiento
giratorio. f
-33-
•
MAGNITUDES
ELEeTRIeAS
Tensión
corriente
carga
inductancia
capacidad
resistencia
V
I
Q
L
e
R
11. 2.3 ~cuaC1ones d1terenC1ales de algunos slstemas
eléctr1Cos.
C1rcu1to capac1t1Vo.
e
8----111---0
,
v
F 19. 'l.. 7
•I
Una expres16n que relac10na la corr1ente - i" de carga
con l.a tensibn "V" es la slgu1ente:
i = e dv
d t
despejando de esta ecuac10n es poslhle obtener la ten-
slCm "V" en flmc16n de la corrlente "i 11 }Jara una deter
minada capacidad J un tiempo dado •
•
dv •
de 2.22 I• 1
Y
d t e
inteqrando se tendr~:
v
ft~JdV - d t
Vo o
t
1
f id t +v - -e
o
siendo Vo la tensión inicial.
-34-
•
I
dv=-dt
e
v
o
•
(2.22)
(2.23)
12. 2.3.2 Circuito inductivo
v
...
o kM; o
•
I
~
Fig. 2.7a
La expresi6n característica que relaciona la corriente
-i- con la tens16n "Vff
es la siguiente:
d i
V = L • (2.24)
d t
operando como en eL caso anterior se podr~ escribir:
de 2 • .1.4
d i: ,
d t
lntegrando se tendr~:
•
I
¡I d •
I
o
•
I
v= - •
L '
1
- -L
1
-L--
d i
t
V
= - d t
L
f Vd t
o
t
J Vd t + •
I
o
o
Slendo 10 la corriente lnlClaL •
.1..3.3 Clrculto OhmlCO
Para este Clrculto
rriente es LlneaL:
La reLaclCn entre La tensiOn y La co
-
v = Ui
-35-
(2.25)
,
J
•
13. v
()~----+I R 1...----0
•
I
Fig. 2.8
2.3.4 CircuiLo con RLC (circuito oscilante,fig.2.8a)
En este circuito la tensión instant6nea 1 del generador
se equilibran con los VR, VL y Ve' Se pueden expresar
as1:
e = VR + VL + Ve
en donde:
V = Ri
R di
V
L
= L a t
t
V =.Lf·dte e o I
•
.-----1-1_ ......1---...
e "-J
Fig. 2.8a
.•
Se tendrá por tanto:
• d •
. e=Ri+L --1.
d t
+-1..
e
t
J i d t
o
2.3.5 Ecuaci6n diferencial de un motor de corriente
continua.
La ecuación diferencial de un motor de corriente conti-
nua (fig.2.9), considerando s610 el circuito del indu -
cido, ha de ser una relación entre el desplazamiento an
guIar 8 (magnitud de ~alida) y la tensión del inducido
Va (magnitud de entrada).
Para lograr esta relación conviene dibujar el circuito
eléctrico equivalente del circuito del inducido dejando
las magnitudes mecánicas, como indica la figura 2.9.
-
-36-
(2.26)
14. El circuito eléctrico
drá expresar~
equivalente de la fig.2.10 se po
V
a
= V R + V L + e; pero
..
v = R i
r
a .,
di
a
V = L .
L d t
-
J-------------__ ___________
e = K we
Va= R ¡a
Fig.
por tanto tendrá:
. di ·
a
+ L·' + K W '
dt e
rara las magnitudes mecánicas
la f.d.t. será .semejante a la
del capitulo 2.26,
Recordando que Cm expresada
en t~rminos el~ctricos viene
dada por~
e = (K i) ·J
m M c a
de donde
KM= constante electromecánica
del motor
. -37-
tVr
V •
I
a a
IVL
te
Fig. 2.10
(2.27)
15. ve
i c= corriente de excitaci6n
e = 1 ,el,2,~ + f el, ~
M d t 2 d t
Ta~bi6n para el circuito de excitaci6n (fig.2.11) con-
viene trazar el circuito equivalente (fig.2.12)
Por lo tanto se podrá expresar:
• ve
•
El circuito mecánico se puede expresar:
e = 1 2
m dt
• . .
R
Fig. 2.11
de+ f $ • I •
d t
e
-3R-
ve
V
r
R
L I
~
Fig. 2.12
(2.28 )
(2.29)
(2.30)
16. 2.4 Paso de las ecuaciones dif erenciales (cap.?2l
a 2.3 G) a la F.n.T. {funci6n de transferencia~
•
La f.d.t. la podemos obtener sustituyendo en la ecuaci6n
diferencial los s!mbolos de derivadas n-ésima por Sn y
los símbolos de integral m-ésima por (l)m (LAPLACE5.
-S
Calculemos la f.d.t. ne los sistemas cuya ecuuci6n dife
rcncial hemos obtenido en las páginas anteriores.
2.4.1
(2. 13)
Salida
Entrada
2.4.2
(2.15)
F -
2.4.3
Movimiento "lineal (fig. 2.2)
2
F = m sustituyendo F = m
1
5 X
-- desplazarliento
fuerza
-
-- ~
F
= I ~.
m • 5
Hovimiento lineal cn prescncia de un sistcr:m
elastico (fig.2.3)
2
""' d x 2
F - m' ,. , + K x sustituyendo F = m 5 x + K x
- d t 2
x 1l' = __._____
F 2
m 5 + K
• " "
Movimiento rectilíneo en Eresencia de un roza-
miento viscoso (fig.2.1)
(f. d t.)
(2. 17) F=
dx
f d t sustituyendo
2
F = m • 5 X + f 5 x;
Salida
Entrada
desplazamiento
=
fuerza
-39-
F = (m 52 + f 5) X
)( 1"
- --,_.~---
F - m 52 + f 5
(f. d.te )
17. 2.4.4 Movimiento rectilíneo en resencia de un sis-
tema elástico de tipo viscoso fig.2.5)
de 2.10 sustituyendo
2
F =ms x+fsx+kx
2.4.5
(2.20)
2.4.6
x 1
- = -_...:._.---
F 2
ms +fs+k
Bovimiento circular (fig.2.6) (r6rmula 2.20)
2
Cm=ls O; o _ l... l .
-Cm I s2
Movimiento circular en presencia de un roza-
.miento viscoso y un par antagonista de tipo
elástico.
2
Cm=ls e + ke + fs0;
2
ls +k+fs
1.• _- = • •• • •
Cm
En los circuitos eléctricos se tendrá:
2.1.7
{2.22}
Salida
Entrada
Para el condensador (fig.2.7)
--
,
dv
i= C···I
d t
tensión
corriente
v =
1
C
v =
1• • JI I i
CS
•
I
= e sv-
sustituyendo i = e s v
v 1
= --- = .. - =
i CS
-40-
(f.d.t.)
(f. d. t. )
(f.d.t.)
18. 2.4.8
2.4.9
Para la inductancia (fig.2.7~
V L
d i
V S L I .
t 1
= • - - = ---d t
, , V SL
-l
• 1
Vd t ; 1
1
V·
V
SLI - - = -- =- L SL
, •,
D
rara el circuito oscilante (fig:.2.Ga)
e = Rt+L~! +.L
t
Ji d t;
o
E=Ri+SLi+ 1
e
I 1__ = ___. 1_ _~_ _ _ _ _ __ _
E 1
R + S L +s"'"d
-Se
Para los circuitos siguientes la f.dt. será:
2.4.10 Figura 2.13
R
, --c=J---r------o
V
e
..
V
s
--
1I I
se,
1R + t . I
se
V s t
1• 4
se
Fig. 2.13
1
v = .. ~ . V
e t- +S R 'e e
I =. . I P P
V 1 + S R ee
-41-
V
s
(f.d.t.)
(f.d.t.)
•
I
(f.d.t.)
19. 2.4.11. (Fig.2.14)
V
e
R
Fig. 2. 14
V
s
V
s
V
e
=
--
2.4.12. (Fig. 2.15)
SL
R+SL
SL
R
1 + S L
R
V
s
- V
e
V
e
V =
e
V
SL
SL•
R ,
vs
e
1 +SL
R
- V
e 1
R
2
1
1 + S e R2,
+ S e (R + R )
1 2
V
s
o TS C
o--------------------L-----------o
-
V
s
V
e
=
Fig.2.15
1 + S e R
2
-42-
I
1