

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a 125631265 cap-2-parte-1
Similar a 125631265 cap-2-parte-1 (20)
Último
Último (20)
125631265 cap-2-parte-1
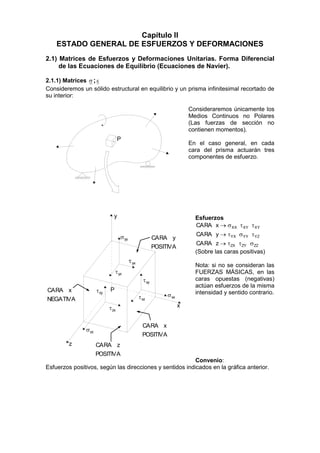
- 1. P xy yx xz zx zy yz xx yy zz x y z P POSITIVA yCARA POSITIVA xCARA POSITIVA zCARA NEGATIVA xCARA Capítulo II ESTADO GENERAL DE ESFUERZOS Y DEFORMACIONES 2.1) Matrices de Esfuerzos y Deformaciones Unitarias. Forma Diferencial de las Ecuaciones de Equilibrio (Ecuaciones de Navier). 2.1.1) Matrices ; Consideremos un sólido estructural en equilibrio y un prisma infinitesimal recortado de su interior: Consideraremos únicamente los Medios Continuos no Polares (Las fuerzas de sección no contienen momentos). En el caso general, en cada cara del prisma actuarán tres componentes de esfuerzo. Esfuerzos ZZZYZX YZYYYX XYXYXX zCARA yCARA xCARA (Sobre las caras positivas) Nota: si no se consideran las FUERZAS MÁSICAS, en las caras opuestas (negativas) actúan esfuerzos de la misma intensidad y sentido contrario. Convenio: Esfuerzos positivos, según las direcciones y sentidos indicados en la gráfica anterior.
- 2. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 212 y x Definición: La matriz ZZZYZX YZYYYX XYXYXX se denomina MATRIZ DE ESFUERZOS Como una respuesta del sólido a los esfuerzos actuantes indicados, se generan las deformaciones unitarias siguientes: ZZZYZX YZYYYX XYXYXX zCARA yCARA xCARA Definición: La matriz ZZZYZX YZYYYX XYXYXX se denomina MATRIZ DE DEFORMACIONES UNITARIAS Las matrices ; definen el Estado Tensional / Deformacional en el punto P del sólido. PROPIEDAD: las matrices ; son matrices 3 × 3 SIMÉTRICAS. Por la Ley de Reciprocidad del Esfuerzo Cortante, tenemos: ZYYZZXXZYXXY ;; Por la definición de Deformación Unitaria Cortante y propiedad conmutativa de la suma: YX XY YXXY Similar para los otros planos: XZZXYZZY ; Debido a la simetría de las matrices ; , para su determinación basta conocer, en cada caso, seis magnitudes o componentes. TRES ESFUERZOS NORMALES Y TRES ESFUERZOS CORTANTES, PARA LA MATRIZ . TRES DEFORMACIONES UNITARIAS NORMALES Y TRES DEFORMACIONES CORTANTES, PARA LA MATRIZ . NOTA. Las matrices de esfuerzo y de deformaciones unitarias ; , se relacionarán entre si a través de constantes elásticas apropiadas (características del material), mediante una matriz denominada Matriz de Constantes Elásticas..
- 3. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 213 2.1.2) Forma Diferencial de las Ecuaciones de Equilibrio (Ecuaciones de Navier) En Estática se formulan ecuaciones del equilibrio para partículas discretas y cuerpos rígidos, en términos de fuerzas y/o momentos. En Mecánica de Sólidos, interesa establecer las ecuaciones del equilibrio en términos de los esfuerzos desarrollados en el interior de los sólidos deformables. Consideremos un volumen elemental recortado de un sólido deformable, para el cual la configuración deformada (en equilibrio) sea un prisma rectangular sometido a esfuerzos y fuerzas másicas. Fuerzas Másicas (de cuerpo o de volumen): Las que influencian directamente los elementos de masa a través del cuerpo o del sólido. Se las define en términos de Unidades de Fuerza por Unidad de Volumen (o unidad de masa). Así los efectos de la gravedad, efectos electromagnéticos,... etc. Deduciremos la ecuación de equilibrio correspondiente a la dirección X; en las otras direcciones (Y Z) la deducción es similar. Sea XB la función distribución de Fuerzas por Unidad de Volumen en dirección OX. (Consideramos únicamente los esfuerzos que generan fuerzas en dirección OX). 0dxdydzBdydx-dydxdy z dxdz-dxdzdy y dydz-dydzdx x 0F xzx zx zx yX yX yX X X X Simplificando, tenemos: y xz dyy yxyx dzz zx zx dy dV Bx dxdz x zx dxvariaciónlaadebida deVariación x x x dx x másicafuerza dzdydxBdVB xx yx
- 4. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 214 i0B zyx x zxxyx Reiterando el procedimiento en las direcciones Y, Z se deducen ecuaciones análogas a la i : ( )ii0=B+ z τ + y σ + x τ y yzyxy ∂ ∂ ∂ ∂ ∂ ∂ iii0B zyx z zyzxy Definición) Las ecuaciones i , ii , iii se denominan Ecuaciones Diferenciales del Equilibrio (Ecuaciones de Navier). Expresan condiciones para el equilibrio en términos de esfuerzos y distribuciones de fuerzas másicas. zyx B,B,BB VECTOR DE FUERZAS MÁSICAS NOTAS: 1. Las ecuaciones de Navier son independientes del material. Esto significa que son validas en régimen elástico o inelástico. 2. No existen ecuaciones en número suficiente para determinar, a partir de ellas, las seis componentes de esfuerzo desconocidas. Esto nos indica que en el Análisis de Esfuerzos, los problemas son Estáticamente Indeterminados. 3. Las ecuaciones de equilibrio 0M se consideraron al estudiar la simetría de la matriz de esfuerzos (Ley de Reciprocidad del Esfuerzo Cortante). 4. Si además el sólido estuviese en movimiento, las ecuaciones de Navier siguen siendo válidas, agregando el término representativo de las fuerzas de inercia (Principio de DI Alambert): 0IFIF0F CxCxx 2.2) Ley Generalizada de Hooke 2.2.1) Ley de Hooke en Tres Direcciones Ortogonales. Ecuaciones de Lamé Consideremos un prisma recto de material elástico, lineal e isotrópico, sometido a esfuerzo normal en tres direcciones ortogonales (No incluimos la presencia de Fuerzas Másicas).
- 5. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 215 Para cada dirección, la deformación unitaria total, es la suma de una DEFORMACIÓN UNITARIA LONGITUDINAL Y DOS DEFORMACIONES TRANSVERSALES. Por comodidad, puede usarse el Principio de Superposición: Para cada dirección aplicaremos la Ley de Hooke (uniaxial) y la definición de Relación de Poisson: 1 E ''' E ''' E ''' E '' E '' E '' E ' E ' E ' z y z y z x y y y y y x x y x y x x Por el principio superposición, las deformaciones unitarias totales, son: y x z y x z y x z NORMALESFUERZO DETRIAXIALESTADO G E MATERIAL = + + y x z y x z y y x x z z z y x xADEBIDAS NESDEFORMACIO z y x ' ' ' yADEBIDAS NESDEFORMACIO z y x '' '' '' z y x ''' ''' ''' zADEBIDAS NESDEFORMACIO TOTALES NESDEFORMACIO MATE RIAL
- 6. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 216 2 '''''' '''''' '''''' zzzz yyyy xxxx Reemplazando las ecs.1) en las ecs 2) y simplificando, tenemos: 3 E 1 E 1 E 1 yxzz zxyy zyxx Def). Las ecuaciones (3) constituyen la Ley Generalizada de Hooke (para esfuerzos normales en tres direcciones ortogonales). Notas) 1. Si el material es elástico, lineal e isotrópico, los elementos de la matriz y sus correspondientes de la matriz , se relacionan mediante las ecuaciones: 4 G 1 G 1 G 1 E 1 E 1 E 1 yzyz xzxz xyxy yxzz zxyy zyxx Estas ecuaciones nos permiten obtener las Deformaciones Unitarias Normales y Cortantes, conociendo los esfuerzos y las características elásticas (E, G) del material. 2. Las ecuaciones (4) pueden invertirse para obtener los esfuerzos en función de las deformaciones unitarias normales y cortantes. Se obtienen: 1.5 2 2 2 zyxzz zyxyy zyxxx 2.5 G G G zyzy xzxz xyxy
- 7. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 217 y x c r 'y'x Definición). Las ecuaciones (5.1) para ,, zyx se denominan Ecuaciones de LAMÉ (del Estado Triaxial de Esfuerzos Normales). Las constantes elásticas , están dadas por: G 211 E ;G 12 E (5.3) denominadas Constantes Elásticas de Lamé. 2.2.2) Definiciones. i) INVARIANTE: cantidad cuyo valor no depende del sistema de coordenadas de referencia. 2 rA Invariante Las coordenadas del centro (C) cambian si se consideran otros sistemas de coordenadas. Las coordenadas del centro C no son invariantes. ii)La suma zyx (traza de la matriz ) se denomina Primer Invariante de Esfuerzos: zyx1 La suma zyx (traza de la matriz ) se denomina Primer Invariante de Deformaciones Unitarias. zyx1 Entre 1 y 1 se verifica la relación 11 E 21 (La invarianza 1 se demostrará al estudiar la Transformación General de Esfuerzos). iii) El invariante zyx1 es numéricamente igual al cambio Unitario de Volumen. 0 zyx1 V V ; siendo V0 el volumen inicial. Por consiguiente el variante θ1 mide el cambio de volumen por unidad de volumen. iv) Un estado de esfuerzos definido por la matriz 0p 00 00 00 se llama ESTADO HIDROSTÁTICO DE ESFUERZOS. (Estado volumétrico ó Estado de comprensión triaxial). Recuerda al principio de Pascal: La presión hidrostática es la misma en todas las direcciones.
- 8. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 218 Si el material es elástico, lineal e isotrópico, tenemos: ppp E 21 1 1 213 E p , es decir 1Kp , siendo 213 E K el denominado MÓDULO DE COMPRESIBILIDAD DEL MATERIAL. (MÓDULO VOLUMÉTRICO, Bulks). K: representa un valor de esfuerzo de compresión necesario para producir una deformación volumétrica igual a la unidad (K es el valor de –p para generar θ1 = 1). EJEMPLOS 1) En el interior de un sólido, los esfuerzos están dados por la matriz 2 32 22 z200 0y3y 3 1 xy1 0xy1yx (unidades de esfuerzo) Determinar la distribución de Fuerzas Másicas, si el equilibrio debe satisfacerse en todo punto del sólido. Esfuerzos yx2 x xy1 2 xy 0zx y3y 3 1 3 y 0yz 2 z z2 Reemplazando en las Ecuaciones de Navier (ecs i, ii, iii), obtenemos: 0B0Bz400 0B0B03y3 3 1 y-1 0B0B0xy2xy2 zz yy 22 xx Luego, vector de fuerzas másicas es: B = (0, 0, -4z) (vector típico de efectos de peso propio). 2) Demostrar la igualdad. G3K GK9 E , donde E: Modulo de Elasticidad Lineal G: Modulo de Rigidez. K: Modulo Volumétrico. Sabemos que: )i(1g2E )ii( E 21 11 )iii(K 1 De (iii) y (ii) obtenemos 1 E 21 K p (Estado hidrostático de esfuerzos). Por definición de 1 :
- 9. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 219 A B C D "10"24 "2 3 E 21 K 1 3 E 21 K p De donde )iiii(21K3E Entre las ecuaciones (i ) y (iiii) eliminamos la relación de Poisson . Obtenemos: K6 E 2 1 1 G2 E de donde despejamos E, para obtener finalmente: G3K GK9 E 3) Una varilla de latón AD está acoplada a cierto dispositivo que aplica un confinamiento (presión lateral) de 8,000 lb/pulg2 en la porción BC de la varilla. Sabiendo que E = 15 ×106 lb/pulg2 y 33.0 , determinar: (i) El cambio en la longitud AD; (ii) El cambio en el diámetro en la sección central de la varilla. i) En un punto tal como se presenta estado de confinamiento lateral. 2 zx lgpulb000,8 0y (no hay esfuerzo normal) Usamos la ley generalizada de Hooke en dirección OY: Tenemos zxyy E 1 . Reemplazando valores: 6- y 6y 10x352 000,8000,833.00 1015 1 En cambio en la longitud AD será yL x x z z
- 10. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 220 .lgpu1052.31035210 3611 (Notar que solo la longitud L = 10’’ está afectada por el confinamiento) ii) Cambio en el diámetro: diámetro)delón(disminuci10x33.357 800033.08000 1015 1 E 1 6- x 6x zyxx Luego xdd 6 1033.357''2d adaslgpu1066.714d 6 4) La placa representada está restringida, de tal manera que no puede dilatarse ni contraerse en dirección Y, pero puede hacerlo libremente en las direcciones X, Z. Las superficies de la placa perpendiculares al eje Z están libres de esfuerzo. Si se produce un cambio uniforme de temperatura (ΔT°), hallar zxy ,, . Para cada dirección las deformaciones unitarias totales, son: 3T E 1 2T E 1 1T E 1 yxzz zxyy zyxx TOTAL TOTAL TOTAL Condición → restricción → 0 TOTAL y luego: TEzxx ( haciendo 0 TOTAL y ) Reemplazando datos 0z 0x , tenemos TE0y Reemplazando los valores ,, zyx en la ecuación (1) tenemos: x y y z T 0 ;;E 0 TÉRMICAELÁSTICATOTAL :GENERALEN NESDEFORMACIO
- 11. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 221 T11 E 1 2 0x TOTAL Reemplazando en la ecuación (3), tenemos: T E 1 0 z TOTAL 5) Una placa rectangular de espesor “d” está comprendida entre dos planos paralelos rígidos cuya separación es invariable. La placa está sometida a las fuerzas indicadas P y Q. Calcular la presión que ejerce la placa sobre los planos rígidos. Como el espesor “d” de la placa no puede cambiar debe ser 0z . Luego: yxz E 1 o De donde obtenemos yxz Reemplazando los esfuerzos normales, obtenemos ad P bd Q z La presión total ejercida sobre los planos rígidos, es: abzPTOTAL (área indicada). d a Q d b P bd Q ad P abTOTALP (compresión sobre los planos rígidos). Nota: Observar que 0z NO IMPLICA NECESARIAMENTE 0z 6) En el sistema representado, calcular las nuevas dimensiones de las aristas del bloque rectangular. Barras Elásticas 1 1 1 E A (cuatro, simétricamente ubicadas) Bloque Prismático 2 2E c.b,a,inicialessarista x y y z P P P P P P Q Q Q Q ;E a b d a b d
- 12. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 222 F R F F F Reacciones: 1F4R Esfuerzos en el bloque: ab R x (compresión en dirección de x) y (Dato) 0z (Dato) Deformaciones unitarias (bloque): (Ley Generalizada de Hooke) zy2x 2 x E 1 zx2y 2 y E 1 yx2z 2 z E 1 Reemplazando los esfuerzos tenemos: x y z b c a a c b p p p p Frente Planta 2Bloque 1ElásticasBarras
- 13. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 223 0p ab R E 1 2 2 x 0 ab R p E 1 2 2 y p ab R 0 E 1 2 2 z Simplificando: 2p ab R E 1 2 2 x 3 ab R p E 1 2 2 y 4p ab R E 1 2 2 z Cambios de longitud (bloque): 5p ab R E c c 2 2 xx Cambio de longitud (barra elástica): 6 AE4 Rc AE FL 1111 Condición (paredes rígidas) → Δx = Δ, luego: 11 2 2 AE4 RC p ab R E c de donde obtenemos R: ab 1 AE4 E p R 11 2 2 Conocida la fuerza R, reemplazamos su valor en las ecuaciones (2), (3), (4), para obtener las deformaciones unitarias en el bloque. p 1 AE4 abEE 1 2 11 2 2 2 x 1 AE4 abE p p E 1 11 2 2 2 2 y ; p 1 AE4 abE p E 1 11 2 2 2 2 z Las nuevas dimensiones de las aristas del bloque serán: a’ = a ( 1 + εy ); b’ = a ( b + εz ); c’ = c ( 1 + εx )
- 14. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 224 7) Sobre un cubo de 1 m. de arista, cuyo material es elástico lineal quiere inducirse el Estado de Deformación Unitaria dado por la matriz: k200 0ky2k2 0k2kx2 , donde (x, y, z), son las coordenadas de cualquier punto del sólido, expresadas en cm. Se conoce que 25 cmKg10x6.2E ; 3.0 ; 5 10K . Calcular los esfuerzos requeridos en las caras del bloque. Con los valores E, determinamos las constantes de Lamé: 25 5 cm/Kg105.1 6.013.01 3.0106.2 211 E 25 5 cm/Kg10 3.012 106.2 12 E Usamos las ecuaciones de Lamé para calcular los esfuerzos requeridos en las caras del sólido (Ecuaciones 5.1): zyxxx 2 (y similares) 555555 x 102y102x102105.1x102102 (Las deformaciones εx, εy, εz, → se obtienen de la matriz ). Simplificando se obtiene 3y3x7x De manera similar procedemos para las direcciones y,z. obtenemos: 3y7x3y ; 7y3x3z A partir de las ecuaciones para esfuerzo cortante (ecs 5.2) obtenemos; xyxy G x y z A B C D E F G o
- 15. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 225 210210 55 xy ( recordar que G = μ) ( K2xy , de la matriz ) De manera similar tenemos: 0xz , 0yz Resumen de ecuaciones para los esfuerzos 3y3x7x 2xy 3y7x3y 0xz 7y3x3z 0yz A partir de estas ecuaciones pueden hallarse los esfuerzos en cada cara del prisma. Cara plano )cm/Kg( 2 )cm/Kg( 2 OCDE……………… y = 0 ……… 3x3y …… 2xy ABGF……………… y = 100 cm …… 703x3y …… 2xy AOFE……………… x = 0 ………… 3y3x …… 2xy CBGD……………… x = 100 (cm) …… 703x3x …… 2xy OABC……………… Z = 0 ……… 7y3x3z …… 0 EFGD……………… Z = 100 (cm) …… 7y3x3z …… 0 x y z A B C D E G o F 703y3x 3y3x 703x3y 3x3y 7y3x3z 7y3x3z
- 16. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 226 x y z A B C a b c 8) Un prisma rectangular de aristas a, b, c está solicitado por tres fuerzas normales A, B, C paralelas a las aristas. Hallar la relación entre estas seis magnitudes para que el volumen del prisma no cambie. Considerar el prisma de material elástico lineal (E; ). Esfuerzos bc A x ac B y ab C z Deformaciones unitarias: zyxx E 1 ab c ac B bc A E 1 x → cCbBaA abcE 1 x De manera similar, obtenemos: cCaAbB abcE 1 y ; bBaAcC abcE 1 z Condición: 0V → 0zyx (ver sección 2.2.2) Reemplazando las deformaciones unitarias, tenemos: 0bBaAcCcCaAbBcCbBaA abcE 1 Simplificando → 0ccbBaA21 abcE 1 Como 021 abcE 1 ; la condición buscada será: 0cCbBaA 9) Se hace descender, en el océano, una esfera sólida de acero de 100 mm de diámetro, hasta donde la presión es Pa10x90 6 . Sabiendo que Pa10x200E 9 ; 3.0 , determinar: i) La reducción del diámetro de la esfera.
- 17. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 227 ii) La reducción del volumen de la esfera. iii) El aumento porcentual de la densidad de la esfera. Principio de Pascal pzyx Deformaciones unitarias zyxx E 1 p E 12 ppp E 1 x Similar para zy paray .Obtenemos: p E 12 zyx Reemplazando valores numéricos: 4 9 6 zyx 108.1 10200 109016.0 i) .m108.1108.11.0ddd 54 x ii) 44 0 TOTAL zyx1 104.5108.13 V V (cambio unitario del volumen) 3743 TOTAL m1083.2104.505.0 3 4 V iii) LnVLnmLnp v m p , de donde: V dV p dp (puesto que m es constante) Reemplazando valores: 4 4 7 104.5 10236.5 1083.2 p dp (volumen inicial de la esfera) 0 0 0 0 054.0 p dp 10) Una barra cilíndrica, de material elástico lineal (E, ) está sometida a comprensión p, según se indica en el esquema. Lateralmente la barra está confinada por un tubo cilíndrico de pequeño espesor y módulo elástico 1E . Hallar los esfuerzos normales en la barra.
- 18. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 228 x z x ó c c En la barra interior, la deformación unitaria en dirección X, es: )1.(.......... 11 xx E xzyx E x En el tubo de confinamiento: d 2 dd 2 d e2 LdLe2 1 x c x c xc (Compresión) dd d 1 x c (esfuerzo circunferencial) Deformación unitaria: )2( Edd d E ' 11 x 1 c x P L d 1d 1E ;E x y z :barralaen cúbicosElementos
- 19. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 229 x y z o x x Compatibilidad: xx ' igualamos (1) y (2) 11 x xx Edd d p E 1 , de donde obtenemos: z 11 x dd d E E 1 p (Compresiones). 11) Una barra prismática, de material elástico lineal (E; ) está sometida al estado de esfuerzos 000 000 00 . Determinar: i) La superficie transformada de una esfera de ecuación x2 + y2 + z2 = R2 en el interior de la barra. ii) El volumen encerrado por la nueva superficie. Considerar el origen “O” como punto fijo durante la deformación de la barra. 0yz (dato) Deformaciones unitarias (barra): Ley Generalizada de Hooke: E 1 E 1 zyxx Similarmente: E y ; E z También: ozxyzxy (ver matriz ). Campo de Desplazamientos: )1( x u E 1 x u x
- 20. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 230 )2( y v Ey v y )3( z w Ez w z Integrando las ecuaciones (1), (2), (3), tenemos: )4(z,yfx E u 1 )5(z,xfy E v 2 )6(y,xfz E w 3 Deteminamos las funciones f1 (y; z); f2 (x; z); f3 (x; y) usando las condiciones para distorsión nula 0zxyzxy . Sabemos que: z u x w ; z v y w ; x v y u yzyzxy Luego tenemos: barra.ladeZY,X,PtodoPara ***0 x f z f :6y4De **0 y f z f :6y5De *0 x f v f :5y4De 31 32 21 De (*) notamos que f1 y f2 han de ser funciones de z De (**) notamos que f2 y f3 han de ser funciones de x De (***) notamos que f1 y f3 han de ser funciones de y Luego 332211 Cf;Cf;Cf Desplazamientos: Reemplazamos f1, f2 y f3 en las ecuaciones (4), (5) y (6): 1Cx E u 2y C E v 3z C E w Si el origen es punto fijo 0z 0y 0x para 0w 0v 0u
- 21. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 231 Es decir: Por lo tanto: x y z o r 0r u 'P z,y,xP Con el cual determinamos que 0CCC 321 . En consecuencia el Campo de Desplazamiento se define por: x E u ; y E v ; z E w P Esfera P’ Nueva superficie (Transformada de la esfera) wz,vy,uxr w,v,uz,y,xr urr 'z'y'x 0 Es decir: z y E z'zwz'z E y'yuy'y x E x'xux'x Por lo tanto: E 1 'z z E 1z'z E 1 'y y E 1y'y E 1 'x x E 1x'x Superficie inicial: x2 + y2 + z2 = R2 (esfera) Superficie transformada: 2 2 2 2 2 2 2 R E 1 'z E 1 'y E 1 'x x (Elipsoide de revolución alrededor del eje x)
- 22. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 232 21 E 1R 3 4 V EEE 1R 3 4 V 1VV V VV 3 FINAL 3 FINAL zyxINICIALFINALzyx INICIAL INICIALFINAL 12) Un material elástico (E, , α) originalmente llena una cavidad con lados 2a y altura h, en un bloque rígido, según se indica en el esquema. Encima del material elástico se coloca una tapa rígida y se aplica una fuerza de comprensión F a ésta, al mismo tiempo que se incrementa la temperatura. Expresar el movimiento de la tapa en función de F, T y las constantes elásticas del material. Despreciar cualquier efecto de fricción. Establecemos, en primer lugar los ejes coordenados como se indica en los esquemas. Se excluye la posible fricción → El material deformable no se adhiere a las paredes del bloque rígido ni a la tapa durante la deformación. Con “c” indicaremos el movimiento de la tapa (supuesto positivo según el eje “y” indicado). Como el material deformable es elástico lineal, usamos las ecuaciones de la Ley de Hooke Generalizada, más el efecto de temperatura: 1 T E 1 T E 1 T E 1 yxzz zxyy zyxx x y z F F x c aa h a2 a2 Deformable Material y
- 23. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 233 Debido a la carga aplica, en el material sólo ocurren esfuerzos normales. Por la restricción del bloque rígido, el material sólo experimentará deformaciones normales en dirección Y. 0; zxy Por la simetría (sección transversal cuadrada) .zx (Puede verificarse haciendo 0;0 zx en la 1° y la 3° ecuaciones (1)) Reemplazando en la ecuación (1): ( ) TΔαE+σ+σνσ=0 zyx - De donde obtenemos: )2(T 1 E 1 yx Reemplazando la ecuación (2) en la segunda de las ecuaciones (1) encontramos que: )3(TE 1 1 1 21 E y 2 El esfuerzo en dirección y es: ( ) )4(compresión a4 F =σ 2y También, la deformación unitaria en dirección y, es )5( h c Reemplazando las ecuaciones (4) y (5) en (3) y simplificando obtenemos: ó T a4K3 F 1 1 h c TE a4 F 21 1 1 E 1 h c 2 2 Siendo K el módulo de compresibilidad del material. Si ΔT = 0 F comprime el material y c es negativo Si ΔT ≠ 0, la fuerza F requerida para mantener la tapa en su posición inicial (cuando 0c ), es: TK3a4F 2 13) (Ecuaciones diferenciales del equilibrio en Coordenadas Polares). Al estudiar la distribución de esfuerzos en anillos, discos giratorios y otras piezas curvas, es conveniente emplear Coordenadas Polares:
- 24. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 234 : Angulo polar. : Radio vector. : Esfuerzo Normal en dirección radial. : Esfuerzo Normal en dirección tangencial. Consideremos un elemento plano definido en coordenadas polares. (Esfuerzos en el elemento polar, indicando la variación de los mismos al variar el radio vector y el ángulo polar. No incluimos distribución de fuerzas másicas). Estableciendo el Equilibrio de Fuerzas en dirección radial, tenemos: 0 2 sen 2 senp pp Efectuado operaciones, obtenemos: dibujo. delplanoalunitario, espesordeElementos p p p
- 25. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 235 0 22 pp Simplificando la sumatoria anterior, y dividiendo entre , obtenemos: 0 222 Llevando al límite, cuando 0; , tenemos: 0 Expresión que puede escribirse: 0 Finalmente *0 1 Estableciendo, ahora, el equilibrio de FUERZAS en dirección tangencial (ortogonal a la dirección radial), tenemos: **0 21 Las ecuaciones (*), (**) son las ecuaciones de equilibrio, expresadas en términos de esfuerzos, en un sistema plano de coordenadas polares. No se incluyen las posibles distribuciones polares de fuerzas Másicas. 2.3) Esfuerzos Sobre Planos de Orientación Arbitraria. Transformación General de Esfuerzos. 2.3.1) Esfuerzos Sobre Planos de Orientación Arbitraria. Consideremos un prisma elemental, sometido al estado general de esfuerzos definido por la matriz . zzyzx yzyyx xzxyx Pueden ser definidos los vectores siguientes: xzxyxx ,; Vector esfuerzo sobre la cara X positiva. yzyxyy ,; Vector esfuerzo sobre la cara Y positiva.
- 26. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 236 zzyzxz ,; Vector esfuerzo sobre la cara Z positiva. De manera equivalente, en función de los valores unitarios .k,j,i 1 kji kji kji zzyzxz yzyyxy xzxyxx En general x , y , z , son vectores no paralelos a los vectores unitarios k,j,i respectivamente. Consideremos, ahora, el vector esfuerzo sobre un plano inclinado ABC que pasa por un punto P del sólido. xzxyxx ,, yzyyxy ,, zzyzxz ,, i j k x y z contrario.sentido yintensidadmismalade EsfuerzoVectoresactúan opuestascaraslasEn AB C x y z P xy z N P
- 27. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 237 N Vector Unitario Normal al plano ABC knjmilN . Ecuación cartesiana del plano qnzmylx . Cosenos directores de la normal al plano l2 + m2 + n2 = 1 Sobre el plano ABC, para el equilibrio, se desarrollará un VECTOR ESFUERZO. P Vector esfuerzo sobre el plano inclinado ABC. Generalmente P no es normal al plano ABC. El vector esfuerzo P puede expresarse en función de sus componentes cartesianas rectangulares. )2(kji zPyPxPP Debemos encontrar las componentes zPyPxP ,, en función de los elementos de la matriz y de los cosenos directores l, m, n, de la normal al plano inclinado ABC. La suma vectorial de las fuerzas actuantes sobre el tetraedro OABC nos permite escribir: )3(nml zyxP (Vector esfuerzo en el punto P). Reemplazando las expresiones (1) y (2) en (3), tenemos: kjin kjim kjilkji zyzxz yzyxy xzxyxzPyPxP Simplificando y recordando las condiciones para igualad de vectores, obtenemos: xy z N cosn cosm cosl
- 28. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 238 4 nml nml nml zzyzxPz yzyyxPy xzxyxPx Las ecuaciones (4) definen las Componentes Cartesianas Rectangulares del Vector de Esfuerzos P , en función de las componentes del Vector Normal Unitario N y de los elementos de la Matriz de Esfuerzo . Matricialmente, las ecuaciones (4) se expresan: n m l zzyzx yzyyx xzxyx Pz Py Px Nó P Vector columna de los cosenos directores de la normal al plano inclinado ABC. Definición: El esfuerzo normal en un plano que pasa por P, es la Proyección Ortogonal del Vector p sobre el Vector Normal UnitarioN . EsfuerzoPN Normal en el plano ABC. EsfuerzoPS Cortante en el plano ABC (en la dirección S). (Dirección S normal con N ). La magnitud del esfuerzo Normal, es: escalar)(ProductoNPPN En términos de componentes rectangulares, tenemos: PzPyPxPN PzPyPxPN nσmσlσσ knjmilkσjσiσσ B C N P PN PS s PzPyPxP ,,
- 29. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 239 kz,y,x normalN x y z 0P Reemplazamos Pxσ , Pyσ , Pzσ por sus valores dados en las ecuación (4) y simplificando, tenemos: ....(5)..........2mn2ln2lmσnσmσlσ yzxzxyz 2 y 2 x 2 PN ττ La magnitud del esfuerzo cortante, PS , en dirección S, es: ...(6)..........σσσσσ σσσ 2 PN 2 Pz 2 Py 2 PxPS 2 N 2 PPS Notas: 1. Vector Gradiente Sea 0P un punto sobre la gráfica de kz,y,x El vector unitario normal, es: N Siendo el vector gradiente: k x j x i x , evaluando en el punto 0P . 2. Recordando las operaciones del álgebra matricial, el esfuerzo normal sobre el plano inclinado ABC (ec.5) puede escribirse: NσNσ ó n m l σl m nσ T PN PN Siendo n m l N el vector columna de cosenos directores de la normal al plano inclinado ABC.
- 30. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 240 z x y A B C P''4 ''2 ''6 EJEMPLOS 1. En un sólido la matriz de esfuerzos es 2 pulgKlb 210 135 057 . Determinar el Vector Esfuerzo en un plano que pasa por un punto del sólido, y es paralelo al plano ABC. Plano ABC: 12z2y6x3 1 6 z 2 y 4 x Cosenos directores del vector normal al plano ABC: 7 2 263 2 n 7 6 263 6 m, 7 3 263 3 l 222222222 Vector esfuerzo: 72 76 73 210 135 057 Pz Py Px Efectuando el producto indicado, tenemos: k 7 10 j 7 5 i 7 9 :luego 710 75 79 P Pz Py Px 2. El estado de esfuerzos en un sólido viene dado por 0z20 z20y5 0y5xy3 2 2 (Unidades de esfuerzo), siendo (x, y, z) las coordenadas de cualquier punto del sólido. Determinar el vector esfuerzo actuante en el punto 3,1,2P0 ubicado sobre el cilindro 4zy 22
- 31. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 241 Vector unitario normal: 4zy 04zy:siendoN 22 22 Vector gradiente: 2 3 , 2 1 ,0Nk 2 3 j 2 1 i0 3220 k32j2i0 N :luego k32j2i0 3,1,2Penevaluandokz2jy2i0 222 0 En el punto 0P , la matriz de esfuerzos es: 0320 3205 056 Vector esfuerzo: 23 21 0 0320 3205 056 Pz Py Px Efectuando el producto, e identificando elementos, obtenemos: 25Px 3Py 3Px Luego: k3j3i 2 5 P x y z N 4zy 22 3 ,1,2
- 32. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 242 3. La matriz de esfuerzos en un punto es 012 11 210 y calcular y , de manera que el Vector Esfuerzo en un plano que pasa por ese punto, sea nulo. Encontrar el Vector Unitario Normal para ese plano libre de esfuerzos. Vector esfuerzo P : desconocidos n m l 012 11 210 y Pz Py Px Efectuando el producto e identificando componentes, tenemos: n2mPx ; nml yPy ; ml2Px Condición P = 0. Entonces se requiere: 1....................0n2m 2............0nml y 3..................0ml2 2ml(3)de;2mn(1)De Reemplazando en (2): 01m0 2 m m 2 m yy 0m es imposible, puesto que ocasionaría 0lnm Entonces 101 yy Para este valor, las ecs. (1), (2), (3) quedan: 0ml2 0nml 0n2m Que las resolvemos bajo la condición: 1nml 222 (cosenos directores) 6 1 n; 6 2 m; 6 1 l:Obtenemos Los vectores unitarios normales al plano libre de esfuerzos son: k 6 1 j 6 2 i 6 1 N
- 33. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 243 M 1P 2P 1n 2n 4. Sean 21 PyP los vectores esfuerzo correspondientes a dos planos que pasan por un punto M, Sean 21 nyn las normales a dichos planos. Demostrar que la proyección de 21 nsobreP es igual a la proyección de sobre 12 nsobreP . Debemos probar que: *...............n·Pn·P 1221 Estado de esfuerzos en el punto M: zyzxz yzyxy xzxyx El vector esfuerzo P1 es: 1 1 1 zyzxz yzyxy xzxyx z1 y1 x1 c b a P P P Desarrollando el producto, encontramos: cba,cba;cbaP 1z1yz1xz1yz1y1xy1xz1xy1x1 La proyección de 2121 n·Pes,nsobreP luego: **).........(..........cccb cabcbbbaacabaan·P 21z21yz 21xz21yz21y21xy21xz21xy21x21 De manera similar obtenemos la proyección de 12 nsobreP : *)*........(*..........cccb cabcbbbaacabaan·P 21z21yz 21xz21yz21y21xy21xz21xy21x12 Comparando (**) con (***) obtenemos (*): 1221 n·Pn·P Nota: Este resultado, se denomina Ley de Reciprocidad Generalizada. 5. El estado de esfuerzos en un punto es cb ca ba donde a, b y c son constantes y es un valor dado no nulo. Encontrar las constantes a, b y c de manera que el vector esfuerzo sobre el plano octaédrico sea nulo.
- 34. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 244 cos,cos,cosN A B C z x y ABC es el plano octaédrico, si: 3 1 cos 1coscoscos 222 Normal al plano octaédrico: 3 1 , 3 1 , 3 1 Nó 3 1 , 3 1 , 3 1 N ' Vector esfuerzo sobre el plano octaédrico: 31 31 31 cb ca ba OCT Desarrollando el producto, obtenemos: 3 σ 3 cσ 3 bσ , 3 cσ 3 σ 3 aσ , 3 bσ 3 aσ 3 σ σOCT Condición dada: 0,0,00OCT luego: 0σcσbσ 3 1 ;0cσσaσ 3 1 ;0bσaσσ 3 1 De donde (como es 0 obtenemos: * 01cb 0c1a 0ba1 Resolviendo el sistema (*), tenemos: a = -1/2 b = -1/2 c= -1/2 6. El estado de esfuerzos en un sólido es 0cx0 cx0cx 0cx0 donde c es una constante.
- 35. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 245 i) Probar que se satisfacen las ecuaciones del equilibrio, cuando el vector de fuerzas másicas es nulo. ii) Determinar el vector esfuerzo en 7,4,4P0 sobre el plano 7zy2x2 y sobre la esfera 81zyx 222 i) Las componentes de esfuerzo son: 0;cx;0;0;cz;0 zyzyxyxyx Reemplazando en las ecuaciones de Navier, notamos que se verifican sólo cuando 0BBB zyx ii) Plano 7zy2x2 punto 7,4,4P0 07zy2x2 Vector normal al plano: n (evaluando en 0P ) k 3 1 j 3 2 i 3 2 122 kj2i2 n 222 Vector esfuerzo en el punto 0P : 3 8 ,c 3 18 ,c 3 14 31- 32 32 0c40 c40c7 0c70 0 0 P P Esfera 81zyx 222 k14j8i8 kz2jy2ix281zyx 7,4,4 222 Luego: k 9 7 j 9 4 i 9 4 1488 k14j8i8 n 222 Vector esfuerzo: kc 9 16 j0ic 9 28 916c 0 928c- 97 94- 94 0c40 c40c7 0c70 0 0 P P 7. En el punto P el estado de esfuerzos es 3507 0217 7714 determinar: i) El vector esfuerzo en un plano que contiene a P y es paralelo al plano BGE. ii) El vector esfuerzo en un plano que contiene a P y es paralelo al plano BGFC. iii) Las componentes de esfuerzo normal y esfuerzo cortante en el plano BGFC.
- 36. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 246 i) Hallamos la ecuación del plano BGE: 12z3y2x61 4 z 6 y 2 x Los cosenos directores de la normal al plano, son: 7 3 n 7 2 m 7 6 l 326 3 n 326 2 m 326 6 l 222222222 El vector esfuerzo P es: 73 72 76 3507 0217 7714 P Efectuando el producto, obtenemos: k9j12i11ó 9 12 11 PP (Siendo k,j,i los vectores direccionales unitarios) ii) Hallamos la ecuación del plano BGFC: 4zx21 4 z 2 x Los cosenos directores de la normal al plano son: 5 1 n0m 5 2 l 12 1 n0m 12 2 l 2222 El vector esfuerzo, es: 51 0 52 3507 0217 7714 P Efectuando el producto, obtenemos: x y z A B C P''4 ''2 ''6 D E F G
- 37. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 247 k 5 21 j 5 14 i 5 21 ó 521 514 521 PP iii) Sobre el plano BGFC, el esfuerzo normal, es: normal)e(component 5 63 5 21 0 5 42 512 514 521 5 1 0 5 2 51 0 52 3507 0217 7714 5 1 0 5 2 :luego 51 0 52 NdondeNN N N N N La componente de esfuerzo cortante , es: 5 696.37 5 63 5 21 5 14 5 21 2222 2 N 2 P Nota: Los esfuerzos N y están expresados en las mismas unidades de esfuerzo que los elementos de la matriz . 2.3.2) Transformación General de Esfuerzos i) Propiedad: “Conociendo las componentes de esfuerzo, referidas a tres superficies ortogonales en un punto, pueden calcularse las componentes de esfuerzo que actúan sobre cualquier otra superficie que pasa por el punto referido.”
- 38. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 248 Consideremos un tetraedro infinitesimal OABC, recortado de un sólido en equilibrio. En los planos coordenados actúan esfuerzos dados por la matriz . La superficie ABC tiene como vector unitario normal nznynx a,a,an y sobre ella actúa el esfuerzo normal n y el esfuerzo cortante s 1aaa:recordar 2 nz 2 ny 2 nx La magnitud del esfuerzo normal, es: nz ny nx nznynxn a a a aaa Desarrollando las operaciones matriciales, obtenemos: 1 aaaaaaa aaaaaaaa 2 nzznynzzynxnzzxnznyyz 2 nyynxnyyxnznxxznynxxy 2 nxxn Nota) Observar la coincidencia con la fórmula deducida en la sección anterior (ec.5), con el cambio de nomenclatura para los cosenos directores del vector normal unitario: nznynx anamal n y x z xyyx xz zx yz zy n A B C x y z s s o P
- 39. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 249 A B C s n P La igualdad (1) demuestra que el esfuerzo normal actuante sobre cualquier superficie que contiene al punto para el cual está definido el estado de esfuerzos (mediante la matriz ), depende únicamente de las componentes de esfuerzo y de los cosenos directores de la normal a la superficie de interés. Sean szsysx a,a,a los cosenos directores de una dirección s (contenida en el plano ABC y normal al vector n ). Recordar: sz 2 sy 2 sx 2 aaa = 1 0aaaaaa sznzsynysxnx Estableciendo el equilibrio tetraedro OABC, puede establecerse una expresión, similar a la ec. (1), para el esfuerzo cortante s : 2 aaaaaaaa aaaaaaaaaa sznzzsynzzysxnzzxsznyyz synyysxnyyxsznxxzsynxxysxnxxs La igualdad (2) demuestra que el esfuerzo cortante s , en la dirección s , depende únicamente del estado de esfuerzos y de los cosenos directores de las direcciones n y s . Las ecs. (1) y (2) nos permiten calcular los esfuerzos sobre cualquier superficie que pase por el punto dado, en función de los elementos de la matriz y de los cosenos directores de n y s (ortogonales).
- 40. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 250 x y z o 'y 'x 'z ii) Ecuaciones para la Transformación General de Esfuerzos PROBLEMA Conocida la matriz , referida al sistema x, y, z, encontrar la matriz ’ asociada con el sistema x’ y’ z’. (x, y, z): ortogonal (x’, y’, z’): ortogonal) (x y z) rotación (x’ y’ z’) Para encontrar 'x (Esfuerzo Normal en la dirección X’) Podemos usar la ec. (1), anterior, con el cambio apropiado en la nomencla- tura. Entonces, en la ec. (1) en vez de usar n para la dirección de una superficie (su normal), usamos x’ (normal a la superficie coordenada z’ o’ y’). Reemplazando n por x’ en la ec. (1), tenemos: 3 aaaaaaa aaaaaaaa 2 z'xzy'xz'xzyx'xz'xzxz'xy'xyz 2 y'xyx'xy'xyxz'xx'xxzy'xx'xxy 2 x'xxn Donde: x'xa coseno director entre el eje x’ y el eje x. y'xa coseno director entre el eje x’ y el eje y. etc. En forma semejante, pueden hallarse expresiones para los esfuerzos normales 'y y 'z Se obtienen: 4 aaaaaaa aaaaaaaa 2 z'yzy'yz'yzyx'yz'yzxz'yy'yyz 2 y'yyx'yy'yyxz'yx'yxzy'yx'yxy 2 x'yx'y 5 aaaaaaa aaaaaaaa 2 z'zzy'zz'zzyx'zz'zzxz'zy'zyz 2 y'zyx'zy'zyxz'zx'zxzy'zx'zxy 2 x'zx'z También el esfuerzo cortante 'z'x puede calcularse a partir de la ec. (2) en forma análoga a las usadas para determinar los esfuerzos normales en el sistema rotado (x’ y’ z’). Obtenemos: 6 aaaaaaaa aaaaaaaaaa z'zz'xzy'zz'xzyx'zz'xzxz'zy'xyz y'zy'xyx'zy'xyxz'zx'xxzy'zx'xxyx'zx'xx'z'x y similares para 'y'x , 'z'y . Las ecuaciones para la transformación de esfuerzos, ecuaciones (3), (4), (5), (6),…. Se escriben consistentemente en forma matricial:
- 41. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 251 x y z 'y 'x 'z matriz referida a las coordenadas (x ,y, z). ' matriz referida a las coordenadas (x’, y’, z’). Ambos sistemas de coordenadas son respectivamente ortogonales. MATRIZ DE TRANSFORMACIÓN DE COORDENADAS: A (MATRIZ DE COSENOS DIRECTORES) aaa aaa aaa A z'zy'zx'z z'yy'yx'y z'xy'xx'x (También denominada matriz rotación de coordenadas). En base a esta matriz A , las ecs. (3), (4), (5), (6), se escriben consistentemente: T' AA Siendo: rotación.dematrizladeatranspuestA rotación.dematrizA z'.y'x'sistemaelenesfuerzosdematriz z.x ysistemaelenesfuerzosdematriz T ' Recordar A T : se intercambian filas con columnas en la matriz A aaa aaa aaa A z'zy'zx'z z'yy'yx'y z'xy'xx'x T Recordar también las condiciones de ortonormalidad. EJEMPLOS 1) Demostrar zyx zyn ''''' (Primer invariante de esfuerzos). Sumando respectivamente las ecs. (3), (4) y (5), tenemos: z'yx'yxzy'yx'yxy 2 x'yx 2 z'xzy'xz'xzyx'xz'xzx z'xy'xyz 2 y'xyx'xy'xyx z'xx'xxzy'xx'xxy 2 x'xx'z'y'x aaaaa aaaaa aaaaa aaaaa x y z x’ x'xa y'xa z'xa y’ x'ya y'ya z'ya z’ x'za y'za z'za
- 42. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 252 x'zy'zxzz'zy'zyz 2 y'zy 2 z'yzy'yz'yzyx'yz'yzx z'yy'yyz 2 y'yyx'yy'yyx aaaaa aaaaa aaaaa 2 z'zzy'zz'zzyx'zz'zzx z'zy'zyz 2 y'zyx'zy'zyx aaaaa aaaaa Expresión que puede arreglarse de la manera siguiente: y'zx'zy'yx'yy'xx'xxy 2 z'z 2 z'y 2 z'xz 2 y'z 2 y'y 2 y'xy 2 x'z 2 x'y 2 x'xx'z'y'x aaaaaaaaa aaaaaa Por las condiciones de ortonormalidad, los coeficientes que multiplican a los esfuerzos normales x , y , z valen UNO (son la suma de cuadrados de cosenos directores. Condición de normalidad). También los coeficientes que multiplican a los esfuerzos cortantes ...,xy etc. Valen CERO (condición de ortogonalidad). En consecuencia: zyx'z'y'x (Denominado PRIMER INVARIANTE DE ESFUERZOS). 2) Dado el estado de esfuerzos PaM 0050 0050 505010 , hallar 'x , siendo x’ la dirección k3j2i . Vector Unitario en dirección x’: 14 3 a; 14 2 a; 14 1 aDirectoresCosenos k 14 3 j 14 2 i 14 1 321 k3j2i 'x z'xy'xx'x 22 Usamos la ecuación (escalar) de transformación (ec. 3) (Ver Pág. 261) 2 z'xzy'xz'xzyx'xz'xzxz'xy'xyz 2 y'xyx'xy'xyxz'xx'xxzy'xx'xxy 2 x'xxn aaaaaaa aaaaaaaa Reemplazando valores de los cosenos directores: 14 3 a; 14 2 a; 14 1 a z'xy'xx'x Tenemos:
- 43. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 253 2 2 2 n 14 3 0 14 2 14 3 0 14 2 14 3 50 14 3 14 2 0 14 1 0 14 1 14 2 50 14 3 14 1 50 14 2 14 1 50 14 1 10 Efectuando operaciones, obtenemos: PaM43.6 ' PaM 14 90 14 150 14 100 14 150 14 100 14 10 x'x 'x 3) El estado de esfuerzos en un punto P, referido al sistema de coordenadas x, y, z es 30000 000 00100 . Determinar la matriz de esfuerzos correspondiente a un sistema de ejes obtenido mediante la rotación de 45º, del sistema x y z alrededor del eje z, en sentido horario cuando se mira hacia el punto. Matriz de rotación A 100 02222 02222 A Respecto al sistema rotado x’ y’ z’ , la matriz de esfuerzos, es: T AA' x y z x’ º45cos º135cos º90cos y’ º45cos º45cos º90cos z’ º90cos º90cos º0cos x y z 'y 'x 'z P 0 45 0 45
- 44. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 254 T AσA'σ Efectuando el triple producto matricial, tenemos: 30000 05050 05050 ' 4) En un punto de un sólido, la matriz de esfuerzos está dada por KPa 8000100 000 1000500 , en el sistema inicial de referencia x, y, z. Un nuevo sistema de referencia x’ y’ z’ se obtiene girando el sistema inicial 30º alrededor del eje z, según se indica. Determinar la matriz esfuerzos referida al sistema x’ y’ z’. Usaremos la expresión matricial: T AA' Definimos la matriz de transformación de coordenadas A : X Y z x’ º30cos º30cos º30cos y’ º30cos º30cos º30cos z’ º30cos º30cos º30cos x y z 'y 'x 'z o 0 30 0 30
- 45. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 255 100 0866.05.0 05.0866.0 A T T AA' 100 0866.05.0 05.0866.0 8000100 000 1000500 100 0866.05.0 05.0866.0 'z'y'z'x'z 'z'y'y'x'y 'z'x'y'x'x Desarrollando el triple producto matricial, tenemos: KPa 800506.86 50125216 6.86216375 'z'y'z'x'z 'z'y'y'x'y 'z'x'y'x'x Notar que: .Esfuerzos)deInvarianteimer(Prσ+σ+σ=σ+σ+σ KPa300=800+0+500=σ+σ+σ KPa300=800+125375=σ+σ+σ zyx'z'y'x zyx 'z'y'x → 5) Respecto al sistema x y z, la matriz de esfuerzos es: k00 0k0 00k determinar la matriz de esfuerzos referida al sistema x’ y’ z’. x’: Dirección octaédrica. x y z 'y 'x o 'z 4
- 46. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 256 Usaremos: T AA' Debemos encontrar la matriz de transformación: A Como el eje x’ forma ángulos iguales con los ejes x, y, z, es conocida la primera fila de la matriz A . También, como el ángulo entre z’ y z es 4 , se conocerá el elemento z'za (= cos 45) de la matriz A . Datos: 2 1 a:también 3 1 cos 1coscoscos cosaaa z'z 222 z'xy'xx'x Condiciones: 'zdedirectorescosenos1aaa 'ydedirectorescosenos1aaa 2 x'z 2 y'z 2 x'z 2 x'y 2 y'y 2 x'y (Provienen del coseno de entre dos direcciones): 'z'y0aaaaaa 'z'x0aaaaaa 'y'x0aaaaaa z'zz'yy'zy'yx'zx`y z'zz'xy'zy'xx'xx`x z'yz'xy'yy'xx'yx`x Reemplazando en las 5 ecuaciones anteriores los valores conocidos, determinamos el sistema siguiente: )2(1 2 1 aa )1(1aaa 2 y'z 2 x'z 2 x'y 2 y'y 2 x'y )5(0a 2 1 aaaa )4(0 2 1 aa0 2 1 3 1 a 3 1 a 3 1 )3(0aaa0a 3 1 a 3 1 a 3 1 z'yy'zy'yx'zx`y y'zx'xy'zx'x z'yy'yx'yz'yy'yx'y Las ecuaciones (1), (2), (3), (4), (5) determinan un sistema de cinco ecuaciones con cinco incógnitas: x'ya , y'ya , z'ya , x'za , y'za A partir de las ecuaciones (2) y (4), obtenemos: x y z x’ x'xa y'xa z'xa y’ x'ya y'ya z'ya z’ x'za y'za z'za
- 47. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 257 0a x'z 2 1 a y'z Reemplazando estos valores en (5), obtenemos y'ya = z'ya (*) Esta condición la reemplazamos en (1) y (3): (*) 6 1 aia,consecuenceny 6 1 a, 6 2 a :obtenemosdonde 0a2ay1a2a z'y y'yx'y y'yx'y 2 y'y 2 x'y Tenemos completada la matriz de rotación A 21210 616162 313131 A Finalmente, reemplazamos en: T AA' 21210 616131 316231 K00 0K0 00K 21210 616162 313131 'z'z'y'z'x 'z'y'y'y'x 'z'x'y'x'x Desarrollando el triple producto matricial: k00 0k0 00k zyzxz yzyxy xzxyx 6) La matriz de esfuerzos kkk kkk kkk está referida al sistema x y z. Hallar la matriz referida al sistema x’ y’ z’, según se indica en el esquema. x y z x’ 31 31 31 y’ 62 61 61 z’ 0 21 21
- 48. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 258 Los ejes y’, z, z’ están en un mismo plano vertical. Los ejes x’, x, y están en un mismo plano vertical. Determinaremos la matriz de transformación de coordenadas A : Existen cinco elementos conocidos: 313131 32aa 0aa A y'yx'y y'xx'x Similar al ejemplo anterior, empleamos las condiciones de ortonormalidad: 0 3 1 3 2 3 1 a 3 1 a 00 3 1 a 3 1 a 00aaaa 1 3 2 aa 1aa y'yx`y y'xx`x y'yy'xx'yx`x 2 y'y 2 x`y 2 y'x 2 x`x Resolviendo este sistema, obtenemos: 61a 61a 21a 21a y'y x`y y'x x`x 313131 326161 02121 A Luego: x y z 'y 'x 'z 3 2 cosarc
- 49. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 259 x y z n P P N s 31320 316121 316121 kkk kkk kkk 313131 326161 02121 ' Desarrollando el triple producto matricial, obtenemos: k300 000 000 ' 7) Referida al sistema x y z, la matriz de esfuerzos es: 00 00 00 3 2 1 demostrar que el esfuerzo cortante sobre un plano octaédrico, está dado por: 2 13 2 32 2 21OCT 3 1 n Vector normal unitario a uno de los planos octaédricos. P Vector esfuerzo sobre el plano octaédrico. 3 1 , 3 1 , 3 1 n El esfuerzo sobre el plano octaédrico, es: 3 3 3 31 31 31 00 00 00 3 2 1 P El esfuerzo normal sobre el plano octaédrico, es: 321 3 2 1 N 3 1 31 31 31 00 00 00 313131 El esfuerzo cortante, será:
- 50. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 260 2 13 2 32 2 21OCT 2 321 2 3 2 2 2 1 2 N 2 POCT 3 1 :entransformaseQue 9 1 3 1 2.4) Esfuerzos y Direcciones Principales. Diagonalización de la Matriz Un problema de gran interés en el análisis de esfuerzos, consiste en determinar los máximos valores de los esfuerzos normales y sus direcciones correspondientes. El esfuerzo normal que actúa sobre una cara de un prisma será máximo, cuando en esta cara, los esfuerzos cortantes sean nulos. ( máximo cuando 0 ) En consecuencia, la matriz de esfuerzos deberá transformarse en una matriz diagonal T T: transformación de similaridad. Los ejes 1-2-3 denominan EJES PRINCIPALES DE ESFUERZO 321 3 2 1 T zyzxz yzyxy xzxyx 00 00 00 1 2 2 3 1 3 DIAGONALNO: DIAGONALATRIZM: x y z
- 51. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 261 1 2 3 1N Definición) Los esfuerzos 321 ,, se denominan ESFUERZOS PRINCIPALES. Sus direcciones correspondientes, se denominan DIRECCIONES PRINCIPALES. Los planos donde actúan los esfuerzos principales, se denominan PLANOS PRINCIPALES. Sean 111 n,m,lN el vector unitario normal paralelo al eje principal 1. 1,zcosn 1,ycosm 1,xcosl 1 1 1 El vector esfuerzo sobre el plano cuya normal es 1N , es: (*)N1 Si en el plano indicado, los esfuerzos cortantes son nulos 1N (condición de paralelismo de vectores). La igualdad (*) nos queda: (**)NN 11 Siendo un escalar por determinar. En términos de sus componentes, la ecuación (**) es: 1 1 1 zzyzx yzyyx xzxyx 1 1 1 n m l n m l Efectuando el producto matricial, e, identificando componentes, tenemos: 1z1zy1zx1 1yz1y1yx1 1xz1xy1x1 nmln nmlm nmll Ecuaciones que determinan el sistema lineal homogéneo siguiente: 0nml 0nml 0nml 1z1zy1zx 1yz1y1yx 1xz1xy1x
- 52. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 262 Sistema lineal de ecuaciones homogéneas, que notación matricial se expresa: 0 0 0 n m l 1 1 1 zzyzx yzyyx xzxyx (Las incógnitas son los cosenos directores 111 n,m,l ). Una condición del Álgebra Lineal, expresa:”Para que el sistema de ecuaciones homogéneas ó admita soluciones diferentes de la solución trivial 0nml 111 , es necesario que: 0)sdet( “ En consecuencia, la condición requerida es: 0 zzyzx yzyyx xzxyx Definición) El determinante del anterior sistema de ecuaciones lineales homogéneas )sdet( se denomina DETERMINANTE CARACTERISTICO. La ecuación 0)sdet( se denomina ECUACIÓN CARACTERÍSTICA. Las raíces de la ecuación característica se denominan RAICES CARACTERÍSTICAS. Nota: Las raíces características vienen a ser los valores buscados del escalar λ. También se denominan Valores Característicos. Encontradas las raíces características, mediante el sistema ó se encontrarán los cosenos directores correspondientes (Un juego para raíz característica). Notas: Debido a que es una matriz simétrica de orden 3, las tres raíces de la ecuación característica son REALES (Teorema del Álgebra Lineal). Cada raíz característica es un valor del ESFUERZO PRINCIPAL. Por lo general, las raíces se ordenan 321321 ó . Sustituyendo el valor el valor de cada raíz característica en el sistema ó y recordando que 1nml 222 ; se determinan tres sistemas de COSENOS DIRECTORES. Cada juego de cosenos directores, define una DIRECCIÓN PRINCIPAL. Puede demostrarse que las tres DIRECCIÓNES PRINCIPALES son mutuamente ORTOGONALES. En los planos principales NO actúan esfuerzos cortantes. En consecuencia, la matriz que define el estado PRINCIPAL DE ESFUERZOS es una matriz diagonal:
- 53. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 263 00 00 00 3 2 1 Por esto, el proceso de calcular las raíces y los valores característicos, se denomina DIAGONALIZACIÓN DE LA MATRIZ DE ESFUERZOS (Problema de vectores y valores propios)- Al formular la ecuación características se obtiene un polinomio de la forma 03 2 2 2 1 3 , donde 1 PRIMER INVARIANTE DE ESFUERZOS. 2 SEGUNDO INVARIANTE DE ESFUERZOS. 3 TERCER INVARIANTE DE ESFUERZOS. Sus valores están dados por: y 2 xzx 2 yzz 2 xyyzxzxyzyx3 2 yz 2 xz 2 xyxzzyyx2 zyx1 2 EJEMPLOS 1) Hallar los esfuerzos principales correspondientes al estado de esfuerzos dado por la matriz pulglb 20080150 8000 15000 2 Ecuación Característica: 0 20080150 8000 15000 Desarrollando el determinante, obtenemos: 0900,28200 TICOCARACTERÍSPOLINOMIO 23 Resolviendo la ecuación característica, obtenemos las raíces características: 23.97;23.297;0 321 Los esfuerzos PRINCIPALES son: pulg lb 23.97;0; pulg lb 23.297 21121 2) El estado de esfuerzos en un punto es MPa 100 031 013 . Determinar los esfuerzos principales y sus direcciones correspondientes.
- 54. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 264 Ecuación Característica: 0 100 031 013 Desarrollando el determinante, obtenemos: 0131 2 Raíces Características: 4;2;1 321 Esfuerzos Principales: MPa1;MPa2;MPa4 111 MATRIZ DIAGONAL: MPa 100 020 004 Direcciones Principales: Para 4 : El sistema nos queda 0 0 0 n m l 4100 0431 0143 1 1 1 De donde obtenemos las ecuaciones lineales: 0n0n3 ml0ml ml0ml 11 1111 1111 Que las resolvemos con las condiciones 1nml 2 1 2 1 2 1 10ll 2 1 2 1 En consecuencia: 0n 21m 21l 1 1 1 Vector unitario correspondiente a la primera dirección principal: 0,21,21N1 Para 2 : 0 0 0 n m l 2100 0231 0123 2 2 2 De donde obtenemos las ecuaciones lineales:
- 55. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 265 0n0n ml0ml ml0ml 22 2222 2222 Que las resolvemos con las condiciones 1nml 2 2 2 2 2 2 1l2 2 2 En consecuencia: 0n 21m 21l 2 2 2 Vector unitario correspondiente a la segunda dirección principal: 0,21,21N2 Para 1 : 0 0 0 n m l 1100 0131 0113 3 3 3 De donde obtenemos las ecuaciones lineales: 3333 3333 m2l0m2l 2ml0ml2 0ml 33 1n1mnl 3 2 3 2 3 2 3 Vector unitario correspondiente a la tercera dirección principal: 1,0,0N3 Nota: LOS EJES PRINCIPALES 1-2-3 pueden referirse a los ejes iniciales x, y, z mediante una tabla de cosenos directores: Se define la matriz 100 02121 02121 B La matriz diagonal satisfacerá la condición: T BB 100 02121 02121 100 031 013 100 02121 02121 100 020 004 Encontrando los productos escalares N1 . N2; N1 . N3; N2 . N3 se comprueba que las tres direcciones principales con mutuamente ortogonales. x y z 1 21 21 0 2 21 21 0 3 0 0 1
- 56. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 266 3) Dada la matriz de esfuerzos MPa 202060 204040 604020 , hallar los esfuerzos principales y sus correspondientes direcciones. Ecuación Característica: 0 202060 204040 604020 Desarrollando el determinante, obtenemos: CÚBICAECUACIÓN 23 0000,40600040 Resolviendo la ecuación característica, obtenemos: MPa83.63;44.6;39.97 321 Los esfuerzos principales son: MPa83.63- MPa44.6 MPa97.39 1 1 1 MPa 83.6300 044.60 0039.97 Direcciones principales Reemplazando 39.971 en el sistema ; o en su equivalente ; obtenemos: 0n39.9720m20l60 0n20m39.9740l40 0n60m40l39.9720 111 111 111 Que se resuelve condicionada con: 1nml 2 1 2 1 2 1 Obtenemos: 4402.0n6116.0m6574.0l 111 Que constituyen los cosenos directores de la ra 1 dirección principal. Reiterando el procedimiento, obtenemos los cosenos directores de la rada 3y2 dirección principal: 7919.0n0807.0m6053.0l 4232.0n7871.0m4488.0l 333 222
- 57. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 267 A B Nota: Es útil recordar las condiciones de ortonormalidad: 1cba 1cba 0ccbbaaBA unitariosVectores c,b,aB c,b,aA 2 2 2 2 2 2 2 1 2 1 2 1 212121 222 111 En todos los casos, las matrices y caracterizan el mismo ESTADO DE ESFUERZOS. 4) Para el estado de esfuerzos pulglb 6000300 0500200 3002000 2 se conoce que en un punto dado, uno de los esfuerzos principales es 749 pulglb 2 ¿Qué valor tiene el esfuerzo de compresión máximo en el punto y qué dirección tiene? Para facilitar las operaciones numéricas: pulglbK 6.003.0 05.02.0 3.02.00 2 Ecuación Característica: 0 6.003.0 05.02.0 3.02.0 Desarrollando el determinante, obtenemos: 0069.017.01.1 23 Como un esfuerzo principal es 0.749 pulglbK 2 el polinomio característico debe ser divisible por 0.749- Efectuando la división, el cociente es: 00929.0351.02 Ecuación algebraica cuyas raíces son: ypulgKlb5275.0' 2 2 pulgKlb1765.0'' Por tanto, el esfuerzo de compresión máximo es 2 pulgKlb1765.0 Para esa raíz característica, hallamos los cosenos directores correspondientes
- 58. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 268 x y 'y 'x 0 30 0 30 0 0 0 n m l 1765.06.003.0 01765.05.02.0 3.02.01765.0 Efectuando el producto se tiene las tres ecuaciones: 0n7765.0l3.0 0m6765.0l2.0 0n3.0m2.0l1765.0 Que se resuelve con la condición: 1nml 222 Obtenemos: 347.0n266.0m899.0l La dirección pedida es k347.0j266.0i899.0N 5) Los esfuerzos principales en un punto son 1,000 y 500 2 pulglb ¿Qué valor tienen los esfuerzos que actúan en la dirección de unos ejes que forman un ángulo de 30º, en sentido horario, con los ejes principales? Matriz de esfuerzos principales 000,50 0000,1 () Notar que se trata de un estado bidimensional de esfuerzos. x, y ejes principales x’, y ejes principales Encontramos la matriz rotación A 2321 2123 A La matriz de esfuerzos en el sistema x’, y’ es: T AA' x y X’ cos 30º cos 120º Y’ cos 60º cos 30º
- 59. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 269 1 2 2 3 1 3 unitariovector n,m,ln 2321 2123 000,50 0000,1 2321 2123 ' Efectuando el producto matricial triple, encontramos: 'pulglb 6253125 3125875 ' 'y'y'x 'y'x'x2 2.5) Esfuerzos Octaédricos. Estados Medio y Desviador de Esfuerzos. Elipsoide de Esfuerzos. i) Esfuerzos Octaédricos Un plano cuya normal forma ángulos, iguales con las DIRECCIONES PRINCIPALES de esfuerzos, se denomina PLANO OCTAÉDRICO. 3 1 , 3 1 , 3 1 n Propiedad: sobre un plano octaédrico actúan los esfuerzos: 2 13 2 32 2 21OCT 321OCT 3 1 CORTANTE 3 1 NORMAL En efecto, en el plano octaédrico donde 3 1 , 3 1 , 3 1 n El esfuerzo normal es: 31 31 31 σ00 0σ0 00σ 3 1 , 3 1 , 3 1 3 2 1 OCT Desarrollando los productos:
- 60. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 270 321OCT σσσ 3 1 El vector esfuerzo sobre el plano octaédrico, es: 31 31 31 σ00 0σ0 00σ 3 2 1 P 3 σ , 3 σ , 3 σ 321 P El esfuerzo cortante sobre el plano octaédrico, es: 2 321 2 3 2 2 2 1 OCT 2 OCT 2 POCT 9 1 3333 1 Simplificando, puede escribirse: 2 13 2 32 2 21OCT 3 1 ii) Estados Medio y Desviador de Esfuerzos Muchos trabajos experimentales en laboratorios de ensayo y resistencia de materiales han demostrado que el inicio de la fluencia, en varios tipos de materiales, depende de la magnitud del esfuerzo normal zyxm 3 1 , al cual se denomina Esfuerzo Normal Medio. En varios problemas nos interesará descomponer el estado de esfuerzos en una superposición de dos ESTADOS: dm Donde: m Estado Medio de Esfuerzos (Estado esférico) d Estado Desviador de Esfuerzos
- 61. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 271 mzyzxz yzmyxy xzxymx zyzxz yzyxy xzxyx 3 zyx 00 0 3 zyx 0 00 3 zyx Donde: 3 zyx m En el estado desviador de esfuerzos: 0 3 2 3 2 3 2 1 zyxzyxzyx 1 Si el material es elástico, lineal e isotrópico: El cambio unitario de volumen es: 11 21 es decir, para este caso 01 Propiedad: Como en el Estado Medio de Esfuerzos, no existen esfuerzos cortantes, no se presentan distorsiones angulares. Es decir, el estado medio es responsable de los cambios DE VOLUMEN (sin alterar la FORMA). Como la deformación volumétrica unitaria es NULA en el Estado Desviador de Esfuerzos, no se generan cambios de volumen. Es decir, el estado medio es responsable de los cambios DE FORMA (sin alterar el VOLUMEN). Estas consideraciones serán utilizadas al estudiar los criterios de Falla de Materiales. Nota: Diagonalizando la matriz del estado desviador de esfuerzos d se determinarán los ESFUERZOS DESVIADORES PRINCIPALES. += y x z xy yx xz zx yz zy xy yx xz zx yz zy mx my mz m m m m MEDIOESTADO GENERALESTADO d DESVIADORESTADO
- 62. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 272 Ejemplo: Hallar los esfuerzos desviadores principales asociados con la matriz de esfuerzos: MPa 100 0106 0610 . Encontramos la matriz del estado desviador, a partir de: dm Estado medio: 700 070 007 3 11010 00 0 3 11010 0 00 3 11010 m m Estado desviador: md 6-00 036- 06-3 700 070 007 100 0106 0610 d Sean s"" los esfuerzos principales desviadores. Ecuación característica: 0 s-6-00 0s-36- 06-s-3 Desarrollando el determinante y simplificando, obtenemos: MPa6sMPa3sMPa9s :luego 03s9-ss-6- 321 Son los esfuerzos desviadores principales. iii) Elipsoide de Esfuerzos. Definición: El lugar geométrico de los extremos de los vectores de esfuerzo total, correspondientes a todos los planos que pasan por un punto, se denomina ELIPSOIDE DE ESFUERZOS (ó ELIPSOIDE DE LAMÉ).
- 63. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 273 2 1 3 xP yP zP La ecuación del elipsoide de esfuerzos puede ser referida al triedro de direcciones principales de esfuerzo. Vector esfuerzo P : 3 2 1 z y x Pz Py Px n m l n m l 00 00 00 1ó1 1nml:Pero l;l;l 2 3 2 Pz 2 2 2 Py 2 1 2 Px 2 3 Pz 2 2 Py 2 1 Px 222 3Pz2Py1Px Es la ecuación del elipsoide de esfuerzos. El elipsoide de esfuerzos representa la distribución de las magnitudes del esfuerzo total en un ESPACIO DE ESFUERZOS. 1 2 3 x y z P p n,m,ln n,m,lnunitarianormalconP,porpasaquePlano
- 64. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 274 EJEMPLOS 1) En un punto P , los esfuerzos principales son 121 ; 32 ; 63 . Determinar el vector esfuerzo y su componente normal en el plano octaédrico que pasa por P . Cosenos directores del plano octaédrico nml 3 1 nml1lll 222 Vector esfuerzo sobre el plano octaédrico: k 3 6 j 3 3 i 3 12 36 33 312 31 31 31 600 030 0012 N OCT OCT OCT La componente normal será NN T OCT 3 31 31 31 600 030 0012 3 1 , 3 1 , 3 1 OCT OCT 2) Probar que la componente normal del esfuerzo en un plano octaédrico es igual a un tercio del primer invariante de esfuerzos. Cosenos directores de un plano octaédrico: 3 1 nml Vector esfuerzo en el plano octaédrico: k 3 j 3 i 3 31 31 31 00 00 00 N 321 OCT 3 2 1 OCT OCT Componente normal del vector esfuerzo en el plano octaédrico: NN T OCT 31 31 31 00 00 00 3 1 3 1 3 1 3 2 1 OCT Desarrollando el producto, tenemos:
- 65. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 275 2 1 3 x y z P * 3333 321321 OCT Dada la matriz 3 2 1 00 00 00 , el primer invariante de esfuerzos es la traza de la matriz: **I 3211 Comparando :**y* 1OCT I 3 1 2.6) Esfuerzos Cortantes Máximos Dado el estado general de esfuerzos mediante la matriz , es posible determinar los planos donde actúan los esfuerzos cortantes de máxima o mínima intensidad. Para simplificar los desarrollos algebraicos, es conveniente trabajar con la matriz de esfuerzos en el estado principal . 3 2 1 00 00 00 s.principalesdireccione detriedroalreferida Al rotar el prisma, en sus caras actúan nuevamente esfuerzos normales y cortantes. El propósito es determinar los valores EXTREMOS de los ESFUERZOS CORTANTES y, a su vez, determinar los planos donde estos actúan. Sea n,m,lN entonces, las componentes del vector esfuerzo total, son: P máx p N N x y z buscado Plano s)principale sdireccionelasa(referido buscadoplanoalnormal unitarioVector:N
- 66. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 276 3 2 1 z y x Pz Py Px n m l n m l 00 00 00 Es decir: kljlil 321P La componente de esfuerzo normal N (sobre el plano buscado) es: NPN 2 3 2 2 2 1N 321N nml knjmilknjmil La componente de esfuerzo cortante, cumple la condición: 2 3 2 2 2 1 2 Pz 2 Py 2 Px 2 2 N 2 P 2 nml :decires; Reemplazando las componentes PzPyPx ,, dadas por (*) tenemos: **nmlnml 2 3 2 2 2 1 22 3 22 2 22 1 2 Como depende de los cosenos directores (buscados) n,m,l al variar la dirección del vector normal N , también variará la intensidad del esfuerzo cortante . (ó 2 ) resultan ser funciones de tres variables direccionales: n,m,l ; sujetas a la ecuación de condición 1nml 222 . Estamos frente a un problema de valores extremos condicionados: “Hallar los valores extremos de: nmlnml 2 3 2 2 2 1 22 3 22 2 22 1 2 con la ecuación de restricción 1nml 222 ”. El problema puede solucionarse por algún procedimiento de Optimización Matemática (por ejemplo usando Multiplicadores de Lagrange) Sea ***1nmlnmlnmlF 2222 3 2 2 2 1 22 3 22 2 22 1 Las condiciones de valor extremo son: 01nml;0 n F ;0 m F ;0 l F 222 (Es evidente que el máximo de F también da el máximo de ) Encontrando las derivadas parciales y simplificando, se plantea un sistema de cuatro ecuaciones con cuatro incógnitas ,n,m,l .
- 67. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 277 El sistema referido, es: **** 1nml 0nml2n 0nml2m 0nml2l 222 2 3 2 2 2 13 2 3 2 3 2 2 2 12 2 2 2 3 2 2 2 11 2 1 Un conjunto de soluciones para **** y los correspondientes valores de los esfuerzos cortantes asociados *** , es: A 01n0m0l 00n1m0l 00n0m1l Los esfuerzos cortantes dados por A son evidentemente los VALORES MÍNIMOS. Notar, además que las direcciones dadas por A son las direcciones principales de esfuerzos (por eso, los esfuerzos cortantes son NULOS). Un segundo conjunto de soluciones de **** , es: B 2 0n 2 1 m 2 1 l 22 1 n0m 2 1 l 22 1 n 2 1 m1l 21 13 32 De los tres valores , el mayor es 2 13 puesto que los esfuerzos principales están ordenados 321 2 13 MÁ X que actúa en el plano cuya normal tiene por cosenos directores. Dicho plano, es el plano bisector del ángulo diedro formado por los planos principales donde actúan el esfuerzo principal mayor 1 y el esfuerzo principal menor 3 .
- 68. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 278 Por ley de reciprocidad del esfuerzo cortante, en un plano perpendicular al plano de esfuerzo cortante máximo, también actuará MÁX . En resumen: Para calcular el MÁX , basta determinar los esfuerzos principales mayor, menor 31, puesto que 2 13 MÁX . Mediante operaciones vectoriales es posible encontrar el vector normal unitario correspondiente a los planos de esfuerzo cortante máximo. Nota. Se definen “Esfuerzos Cortantes Principales” a los valores dados por las ecuaciones (B). 2 , 2 , 2 13 1 3 32 3 2 21 2 1 máx 3 1 045 0 45 principal planoPrimer principal planoTercer (Bisector) MÁXIMOCORTANTES ESFUERZOSdePlano m áx m áx MÁXIMOCORTANTES ESFUERZOSel actúandondePlano
- 69. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 279 Donde los índices NO INDICAN FRACCIONES, sino es una convención para indicar que el esfuerzo cortante actúa en el plano que forma 45º con los planos donde actúan los esfuerzos principales respectivos. ( 2 1 Indica que el cortante actúa en el plano bisector del diedro formado por los planos donde actúan 21 y ). EJEMPLOS 1) El estado de esfuerzos en un punto es 1120 1260 005 . Encontrar el máximo esfuerzo cortante. Ecuación característica: 0 1120 1260 005 Desarrollando el determinante, obtenemos las raíces características mediante la ecuación. 010155 10155 321 Esfuerzos principales: 15510 321 Luego el esfuerzo principal máximo es 5.12 2 )15(10 2 13 MÁX (en las mismas unidades que los esfuerzos dados en la matriz) Este esfuerzo actúa en los planos bisectores de los planos principales donde actúan 1 331 y . 2) En un punto P los esfuerzos principales son tales que 3122 . Encontrar el vector normal unitario del plano en el que 4 y 31 2N . 2 1 3 2 1 3 2 1 3 2 1 3 )Normales( incipalesPrEsfuerzos incipalesPrtestancorEsfuerzos cosCúbi Elementos
- 70. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 280 Con respecto a las direcciones principales, el esfuerzo normal N está dado por 2 3 2 2 2 1N nml . El esfuerzo cortante está dado por nmlnml 2 3 2 2 2 1 22 3 22 2 22 1 2 Condiciones del problema: 3122 4 ; 4 ; 4 3131 N 31 2 Reemplazando en las educaciones para yN , tenemos: ** 4 nm 2 l 4 *nm 2 l 2 3122 3 2 2 3122 1 2 31 22 3 2312 1 31 Además, teneos la condición: ***1nml 222 A partir de las ecuaciones * y *** se obtienen de la condición: nl0ln 22 31 Reemplazando “n” por “l ” en la ecuación ** y teniendo presente que la condición *** ahora es 22 ml21 , obtenemos: 8 1 l2 ; de donde 2 1 l . Por consiguiente 2 1 n . De 22 ml21 obtenemos: 2 3 m El vector normal unitario, es 22 1 , 2 3 , 22 1 N Nota: Los valores negativos de n,m,l ; definen el otro sentido del mismo vector. 3) Para la matriz de esfuerzos )5(0a 2 1 aaaa )4(0 2 1 aa0 2 1 3 1 a 3 1 a 3 1 )3(0aaa0a 3 1 a 3 1 a 3 1 z'yy'zy'yx'zx`y y'zx'xy'zx'x z'yy'yx'yz'yy'yx'y determinar los esfuerzos principales, el máximo esfuerzo cortante y el esfuerzo cortante octaédrico.
- 71. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 281 x y z y x xy xy y x Estado bidimensional de esfuerzos Ecuación característica: Desarrollando el determinante y simplificando: Las raíces características son: -49.951''951.63' Por consiguiente, los esfuerzos principales son MPa951.63=σMPa951.63=σ 21 En este caso, el máximo esfuerzo cortante, es: MPa951.56 2 951.49951.63 2 MÁX 21 MÁX El esfuerzo cortante octaédrico, es: MPa62.46 951.63951.4995.49951.63 3 1 3 1 OCT 222 OCT 2 31 2 32 2 21OCT Nota: Recordar que los esfuerzos principales y el esfuerzo cortante máximo NO se representan en los mismos planos. Los esfuerzos bidimensionales se presentan en innumerables aplicaciones de la Mecánica de Sólidos. Por su utilidad, en la sección siguiente estudiaremos en detalle el caso del Estado Bidimensional de Esfuerzos (denominado también ESTADO
- 72. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 282 x y z x xy yx xy yx y y x y x xy xy y x x y PLANO DE ESFUERZOS). Una aplicación importante del estado plano de esfuerzos, es el estudio de los Recipientes de Pared Delgada sometidos a presión. 2.7) Estado Plano de Esfuerzos 2.7.1) Definiciones Si dos caras paralelas de un elemento prismático, representativo del estado de esfuerzos en un sólido, están LIBRES DE ESFUERZO se presentan EL ESTADO PLANO DE ESFUERZOS. Seleccionemos al eje z como el eje perpendicular a las caras libres de esfuerzo. La matriz de esfuerzos, es: zyzxz yzyxy xzxyx Que para el caso, puede representarse: yxy xyx (Matriz representativa del estado de plano de esfuerzos). Esfuerzos del estado plano con signo positivo (CONVENIO). 2.7.2) Transformación de Esfuerzos Bidireccionales El estado plano de esfuerzos es bastante usado y útil, por cuanto aproximadamente corresponde a innumerables situaciones físicas de interés en Ingeniería. En esta sección estudiaremos las ecuaciones de transformación de esfuerzos, cuando se cambia el sistema de coordenadas de referencia. Sólo analizaremos el caso de rotación de coordenadas, dejando el eje “z” invariante.
- 73. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 283 y x 'y 'x '' YX '' YX ' X ' Y ' Y ' X Nota: Tener en cuenta que estamos frente a un caso particular de la transformación de esfuerzos estudiaremos en la sección 2.3.2. Para el caso, el estado de esfuerzos (en el sistema rotado) viene dado por la matriz 000 0 0 'y'y'x 'y'x'x 000 0 0 'y'y'x 'y'x'x La matriz transformación de coordenadas es: 100 0cossen 0sencos A La matriz de esfuerzos en el sistema rotado, se expresa por T AA' Luego: 100 0cossen 0sencos 000 0 0 100 0cossen 0sencos 000 0 0 yyx xyx 'y'y'x 'y'x'x X y z x’ cos 2 cos 2 cos y’ 2 cos cos 2 cos z’ 2 cos 2 cos 0cos
- 74. Mecánica de Sólidos Mg. Ingº Carlos Esparza Díaz 284 Desarrollando los productos matriciales, e identificando los respectivos elementos, tenemos: * cossen2cossen sencoscossen cossen2sencos xy 2 y 2 x'y 22 xyyx'y'x xy 2 y 2 x'x Conviene expresar las ecuaciones * en términos del ángulo doble: ** 2sen2cos 2 1 2 1 2cos2sen 2 1 2sen2cos 2 1 2 1 xyyxyx'y xyyx'y'x xyyxyx'x Las ecuaciones * o sus equivalentes ** son las ecuaciones de transformación de esfuerzos planos por rotación de coordenadas. Nota: Observar que yx'yx' primer invariante de esfuerzos (sumar la primera y tercera de las ecuaciones ** ) 2.7.3) Esfuerzos Principales Ecuación característica: 0 yyx xyx Desarrollando el determinante obtenemos: 0 2 xyyxyx 2 Raíces característica: 2 4 2 xy 2 yxyx 1 2 4 2 xy 2 yxyx 2 Los Esfuerzos Principales, son: 2 4 2 4 2 xy 2 yxyx 1 2 xy 2 yxyx 1