Descargar para leer sin conexión

![2 Concepto de integral definida
Vamos a introducir el concepto de integral definida a partir del problema del
c´alculo de ´areas ya que (aparte de que as´ı es como surgi´o hist´oricamente) este
tipo de enfoque permite una presentaci´on gr´afica muy sencilla de comprender.
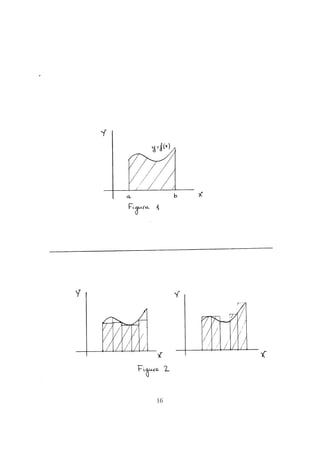
Empezamos considerando una funci´on de una variable y = f(x) definida
sobre el intervalo [a, b] y que toma valores positivos. Queremos calcular el
´area comprendida entre la curva y = f(x), el eje de abscisas, X = a y X = b
(ver Figura 1).
El problema se aborda, desde un punto de vista te´orico, mediante las
sumas inferiores y superiores, que utilizan rect´angulos con bases cada vez
m´as estrechas y que, intuitivamente, nos van dando el ´area requerida cada
vez con mayor precisi´on (ver Figura 2).
Definici´on.- Consideramos una funci´on continua y = f(x) definida sobre
el intervalo [a, b]. En este caso, se puede probar que el supremo de las sumas
inferiores coincide con el´ınfimo de las sumas superiores, y este n´umero com´un
recibe el nombre de integral definida de y = f(x) sobre el intervalo [a, b],
y se representa por
b
a
f(x)dx •
Las funciones con las que habitualmente se trabaja en las Ciencias Exper-
imentales son funciones continuas y, por tanto, tendr´a sentido hablar de su
integral definida. Si la funci´on y = f(x) toma valores positivos sobre [a, b],
esta integral definida proporciona el ´area encerrada entre la curva y = f(x),
el eje de abscisas, X = a y X = b. Cuando la funci´on sea positiva en unos
trozos y negativa en otros habr´a que tener un poco de cuidado para calcular
´areas, como veremos m´as adelante.
3 Soluciones exactas
Las sumas inferiores y superiores son necesarias para la formalizaci´on matem´a-
tica del concepto pero, si se quiere aplicar ese proceso al c´alculo efectivo de
integrales definidas, nos encontramos con que dicho proceso es tedioso en
los casos sencillos e inaplicable en los casos complicados. Afortunadamente,
existen procedimientos sencillos, basados en una maravillosa y sorprendente
relaci´on que existe entre derivaci´on e integraci´on.
2](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-2-320.jpg)
![Definici´on.- Se llama primitiva (o antiderivada) de una funci´on y =
f(x) a otra funci´on, F(x), tal que F (x) = f(x). •
La utilidad de las primitivas procede del siguiente resultado:
Teorema.- Consideramos una funci´on continua y = f(x) definida sobre
el intervalo [a, b]. Si F(x) es una primitiva de f(x), entonces:
b
a
f(x)dx = F(b) − F(a) •
Esta relaci´on entre integrales definidas y primitivas es la que motiva la
notaci´on de la integral indefinida para expresar que F(x) es una primitiva de
f(x):
f(x)dx = F(x) + C.
Obs´ervese que, si F(x) es una primitiva de f(x), F(x) + C, obviamente,
tambi´en lo es.
El resultado anterior motiv´o la proliferaci´on de m´etodos de integraci´on
encaminados a obtener primitivas de funciones porque, de ese modo, se re-
solv´ıa el problema de calcular integrales definidas.
En esta secci´on, recordaremos algunos m´etodos sencillos para obtener
primitivas. En todos ellos, se trata de reducir la integral a otra u otras que
sean inmediatas.
Sustituci´on o cambio de variable
El m´etodo de sustituci´on o cambio de variable es uno de los m´as utilizados.
A grandes rasgos, consiste en lo siguiente:
a) Queremos obtener una primitiva de f(x), es decir, queremos calcular
la integral indefinida f(x)dx, pero no es inmediata.
b) Definimos una nueva variable, u = g(x). Recordando la relaci´on de las
diferenciales con las derivadas, tenemos:
u = g (x) =
du
dx
⇒ dx =
du
g (x)
c) Sustituimos x y dx en f(x)dx, con el objetivo de obtener una nueva
integral indefinida que quede expresada solamente en funci´on de la nueva
variable u. Si la nueva integral indefinida es inmediata, la resolvemos, y
deshacemos el cambio, para dejar la primitiva expresada en funci´on de x.
3](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-3-320.jpg)



![La ´ultima integral indefinida, 1
(x+1)2 = − 1
x+1
, es bastante inmediata,
pero se puede facilitar su c´alculo definiendo u = x + 1 y aplicando el m´etodo
de cambio de variable. •
El m´etodo de descomposici´on en fracciones simples se complica cuando
aparecen ra´ıces imaginarias en el denominador. Estos casos m´as complicados,
junto con otros m´etodos de obtenci´on de primitivas, se pueden encontrar en
los libros dedicados a este objetivo. Aqu´ı no vamos a profundizar m´as en
dichos m´etodos porque nuestro objetivo es obtener el valor de integrales
definidas y en la pr´oxima secci´on veremos que esto se puede hacer, de forma
aproximada, con m´etodos muy sencillos.
4 Soluciones aproximadas
Como se ha dicho desde el principio del cap´ıtulo, nuestro objetivo es hallar
el valor de integrales definidas, b
a f(x)dx, donde f(x) es una funci´on con-
tinua. En aquellos casos en que podemos encontrar una primitiva, F(x), de
la funci´on f(x), el problema queda resuelto. Pero, en muchas ocasiones, en-
contrar una primitiva no es posible o es francamente complicado. Adem´as,
tambi´en en muchas ocasiones, es m´as que suficiente para nuestros prop´ositos
obtener el valor aproximado de b
a f(x)dx. Veremos a continuaci´on dos pro-
cedimientos num´ericos sencillos que dan soluciones aproximadas para una
integral definida.
Regla del trapecio
Consideramos una funci´on continua, y = f(x), y queremos calcular,
aproximadamente, b
a f(x)dx. Dividimos el intervalo [a, b] en varios subinter-
valos, todos ellos con la misma longitud h. Como se puede ver en la Figura
3, el ´area que se obtiene con la integral definida queda muy aproximada por
la suma de las ´areas de los trapecios representados en la figura.
El ´area de cada uno de los trapecios es la semisuma de las bases por la
altura, de modo que tenemos:
b
a
f(x)dx A1 + A2 + ... + An
=
f(x0) + f(x1)
2
h +
f(x1) + f(x2)
2
h + ... +
f(xn−1) + f(xn)
2
h
=
h
2
[f(x0) + 2f(x1) + ... + 2f(xn−1) + f(xn)]
7](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-7-320.jpg)
![La expresi´on que acabamos de obtener recibe el nombre de regla del
trapecio y sirve para calcular, aproximadamente, una integral definida.
Regla de Simpson
La regla de Simpson proporcionar´a otra aproximaci´on al valor de una
integral definida. Su obtenci´on es algo m´as complicada que la regla del
trapecio, pero es algo m´as precisa, y la regla que resulta al final es tambi´en
muy sencilla de aplicar.
Consideramos nuevamente una funci´on continua, y = f(x), y queremos
calcular, aproximadamente, b
a f(x)dx.
Detalles t´ecnicos de la obtenci´on de la regla de Simpson:
Para empezar, dividimos el intervalo [a, b] en dos subintervalos con la
misma longitud h, y trasladamos todo el recinto sobre el eje horizontal hasta
dejarlo centrado en el origen (ver Figura 4). Los dos recintos tienen la misma
superficie.
A continuaci´on, consideramos un polinomio de grado 3, a + bx + cx2
+
dx3
, que pase por los puntos (−h, g(−h)), (0, g(0)) y (h, g(h)), de modo que
tenemos:
a − bh + ch2
− dh3
= g(−h) = f(x0)
a = g(0) = f(x1) (1)
a + bh + ch2
+ dh3
= g(h) = f(x2)
Al exigir que ese polinomio de grado 3 pase por esos tres puntos, estamos
consiguiendo que su gr´afica sea “parecida” a la de g(x), y tenemos:
b
a
f(x)dx =
h
−h
g(x)dx
h
−h
[a + bx + cx2
+ dx3
]dx
= ax + b
x2
2
+ c
x3
3
+ d
x4
4
h
−h
= 2ah + 2c
h3
3
=
h
3
[6a + 2ch2
]
Finalmente, comprobaremos que
h
3
[6a + 2ch2
] =
h
3
[f(x0) + 4f(x1) + f(x2)].
En efecto, utilizando (1), tenemos:
8](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-8-320.jpg)
![h
3
[f(x0) + 4f(x1) + f(x2)]
=
h
3
[(a − bh + ch2
− dh3
) + 4(a) + (a + bh + ch2
+ dh3
)]
=
h
3
[6a + 2ch2
]
Por tanto, hemos obtenido:
b
a
f(x)dx
h
3
[f(x0) + 4f(x1) + f(x2)]
Si ahora dividimos el intervalo [a, b] en cuatro subintervalos con la misma
longitud h (ver Figura 5), tenemos:
b
a
f(x)dx =
x2
x0
f(x)dx +
x4
x2
f(x)dx
h
3
[f(x0) + 4f(x1) + f(x2)] +
h
3
[f(x2) + 4f(x3) + f(x4)]
=
h
3
[f(x0) + 4f(x1) + 2f(x2) + 4f(x3) + f(x4)]
En general, si dividimos el intervalo [a, b] en un n´umero par de subinter-
valos, todos ellos con la misma longitud h, obtenemos la regla de Simpson:
b
a
f(x)dx
h
3
[f(x0)+4f(x1)+2f(x2)+4f(x3)+2f(x4)+...+4f(xn−1)+f(xn)]
Obs´ervese que tanto la regla del trapecio como la regla de Simpson son
muy sencillas de aplicar: no necesitamos obtener primitivas, no necesitamos
obtener derivadas, s´olo necesitamos calcular el valor de la funci´on f(x) en
unos cuantos puntos.
Aplicamos la regla de Simpson en los dos siguientes ejemplos para ilustrar,
tanto la sencillez de su utilizaci´on, como la calidad de la aproximaci´on que
proporciona.
Ejemplo 5.- Supongamos que queremos calcular la siguiente integral
definida:
50
30
f(x)dx =
50
30
(0, 1)e−(0,1)x
dx
9](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-9-320.jpg)
![Este tipo de integrales tendr´a mucho inter´es aplicado al utilizar el modelo
Exponencial como modelo de Probabilidad. De momento, se trata simple-
mente de una integral definida.
En este caso, podemos proceder de dos formas:
C´alculos aproximados
Por ejemplo, podemos aplicar la regla del trapecio con 4 subintervalos:
50
30
f(x)dx =
50
30
(0, 1)e−(0,1)x
dx
=
5
2
[f(30) + 2f(35) + 2f(40) + 2f(45) + f(50)]
=
5
2
[0, 0050 + 2(0, 0030) + 2(0, 0018) + 2(0, 0011) + 0, 0007]
= 0, 0438 0, 04
Tambi´en podemos aplicar la regla de Simpson con 4 subintervalos:
50
30
f(x)dx =
50
30
(0, 1)e−(0,1)x
dx
=
5
3
[f(30) + 4f(35) + 2f(40) + 4f(45) + f(50)]
=
5
3
[0, 0050 + 4(0, 0030) + 2(0, 0018) + 4(0, 0011) + 0, 0007]
= 0, 0428 0, 04
C´alculo exacto
En este caso, la integral definida se puede evaluar de forma exacta de
manera muy sencilla:
50
30
f(x)dx =
50
30
(0, 1)e−(0,1)x
dx = −e−(0,1)x 50
30
= 0, 0431 0, 04
Como se puede apreciar, la diferencia entre el resultado exacto y los re-
sultados aproximados es m´ınima. Teniendo en cuenta que cualquier modelo
que empleemos en las Ciencias Experimentales nunca ser´a una descripci´on
exacta de la realidad sino (en el mejor de los casos) una buena aproximaci´on,
los resultados aproximados aportados por la regla del trapecio y por la regla
de Simpson (utilizando s´olo 4 subintervalos) son magn´ıficos. •
Ejemplo 6.- Supongamos ahora que queremos calcular la siguiente inte-
gral definida:
300
260
f(x)dx =
300
260
1
20
√
2π
e
− 1
2(20)2 (x−240)2
dx
10](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-10-320.jpg)
![Este tipo de integrales tendr´a mucho inter´es aplicado al utilizar el modelo
Normal como modelo de Probabilidad. De momento, se trata simplemente
de una integral definida.
Podemos aplicar la regla de Simpson con 4 subintervalos, y tenemos:
300
260
f(x)dx =
300
260
1
20
√
2π
e
− 1
2(20)2 (x−240)2
dx
=
10
3
[f(260) + 4f(270) + 2f(280) + 4f(290) + f(300)]
=
10
3
[0, 0121 + 4(0, 0065) + 2(0, 0027) + 4(0, 0009) + 0, 0002]
= 0, 1577 0, 16
En este caso, nos tenemos que conformar con una soluci´on aproximada
pero, como se ha puesto de manifiesto en el ejemplo anterior, esto no suele
ser un problema. •
5 Utilizaci´on de R
La aplicaci´on de la regla del trapecio y de la regla de Simpson no ofrece
ninguna complicaci´on, como se ha podido comprobar en los ejemplos de la
Secci´on 4. En esos ejemplos, se utilizaban 4 subintervalos y se obten´ıan
muy buenas aproximaciones. Sin embargo, a veces, es necesario utilizar m´as
subintervalos, para mejorar la aproximaci´on. El aumento del n´umero de
subintervalos no supone ninguna complicaci´on te´orica pero, si se quiere llevar
a cabo con una calculadora, el proceso puede resultar enormemente tedioso,
aumentando la probabilidad de que se produzcan errores. Por este motivo,
cuando se quiere utilizar un n´umero algo elevado de subintervalos, es muy
conveniente recurrir a programas inform´aticos.
Uno de los muchos programas que se pueden utilizar es el programa R,
The R Project for Statistical Computing, que se puede descargar y utilizar
de forma gratu´ıta.
Volvamos al Ejemplo 5, para ilustrar el uso de R.
Ejemplo 5 (continuaci´on).- Seguimos queriendo calcular la siguiente
integral definida:
50
30
f(x)dx =
50
30
(0, 1)e−(0,1)x
dx
Aplicaremos nuevamente la regla de Simpson, pero ahora utilizaremos 10
subintervalos. Llevar esto a cabo con una calculadora ser´ıa bastante pesado,
11](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-11-320.jpg)
![ya que tendr´ıamos que ir calculando cu´anto vale la funci´on que se desea
integrar en los 11 extremos de los 10 subintervalos. Es mucho m´as c´omodo
recurrir a R, que har´a esos c´alculos para nosotros. Los pasos que habr´ıa que
dar son los siguientes:
1. En primer lugar, tenemos que definir en R la funci´on f(x) que se quiere
integrar. En este caso, escribir´ıamos:
f= function(x){0.1*exp(-0.1*x)}
La estructura de la instrucci´on es bastante sencilla, y no necesita de-
masiadas explicaciones.
2. En segundo (y ´ultimo) lugar, aplicamos la regla de Simpson. En este
caso, vamos a dividir el intervalo [30, 50] en 10 subintervalos, cada
uno de ellos con una longitud h = 2. La estructura de la siguiente
instrucci´on, donde se aplica la regla de Simpson, tampoco necesita
demasiadas explicaciones:
(2/3)*(f(30)+4*f(32)+2*f(34)+4*f(36)+2*f(38)+4*f(40)+2*f(42)+4*f(44)
+2*f(46)+4*f(48)+f(50))
El resultado que se obtiene es 0,0431. Como se puede observar, este
resultado aproximado coincide, por lo menos hasta la cuarta cifra dec-
imal, con el resultado exacto. •
6 Aplicaciones de la integral definida
En esta secci´on, vamos a estudiar varias aplicaciones de la integral definida,
es decir, algunos problemas concretos en los que la soluci´on al problema se
obtiene mediante la utilizaci´on de la integral definida.
C´alculo de ´areas
Primer caso: ´Area entre una funci´on positiva y el eje de abscisas.
Este es el problema con el que hemos iniciado el cap´ıtulo para motivar la
necesidad del concepto de integral definida. Como ya hemos dicho, tenemos:
“´Area entre y = f(x) (positiva), el eje de abscisas, X = a y X = b”
= b
a f(x)dx.
Segundo caso: ´Area entre una funci´on cualquiera y el eje de abscisas.
12](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-12-320.jpg)
![Ahora queremos determinar el ´area comprendida entre una funci´on cualquiera
y = f(x), el eje de abscisas, X = a y X = b (ver Figura 6).
Tenemos:
“´Area entre y = f(x), el eje de abscisas, X = a y X = b”
= A1 + A2 = c
a f(x)dx+ b
c [−f(x)]dx = c
a f(x)dx − b
c f(x)dx
Tercer caso: ´Area entre dos funciones.
Ahora queremos calcular el ´area comprendida entre las funciones y = f(x)
e Y = g(x) (ver Figura 7).
Tenemos:
“´Area entre y = f(x), y = g(x), X = a y X = b”=A1 + A2
= [ c
a f(x)dx − c
a g(x)dx] + b
c g(x)dx − b
c f(x)dx
Diferencia de posici´on de un m´ovil entre dos instantes
Consideramos una part´ıcula o un objeto que se mueve (un m´ovil) a lo
largo de un eje con una velocidad v(t), y queremos calcular la diferencia de
posici´on de este m´ovil entre dos instantes t = a y t = b.
Llamaremos P = P(t) a la funci´on que describe la posici´on que ocupa el
m´ovil a lo largo del eje en funci´on del tiempo. Recordemos que, en F´ısica, v(t)
es la velocidad de variaci´on de la posici´on P(t). Por lo tanto, P (t) = v(t),
es decir, P(t) es una primitiva de v(t). Por lo tanto, aplicando el resultado
que relaciona las primitivas con la integral definida, tenemos:
“Diferencia de posici´on entre t = a y t = b”
= P(b) − P(a)= b
a v(t)dt.
Diferencia de poblaci´on entre dos instantes
Consideramos una poblaci´on en la que el n´umero de individuos var´ıa
con una velocidad v(t) a lo largo del tiempo. Esta velocidad ser´a positiva
(cuando la poblaci´on aumenta) o negativa (cuando la poblaci´on disminuye).
Queremos calcular la diferencia de poblaci´on entre dos instantes t = a y
t = b.
Este problema es an´alogo al de calcular la diferencia de posici´on de un
m´ovil, s´olo que en este caso estamos interesados en la variable que representa
13](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-13-320.jpg)

![= c
a v(t)dt + b
c [−v(t)]dt = c
a v(t)dt − b
c v(t)dt.
15](https://image.slidesharecdn.com/2-integracion-150128234910-conversion-gate02/85/2-integracion-15-320.jpg)




Este documento introduce el concepto de integral definida y describe varios métodos para calcularlas. Primero, presenta ejemplos motivadores de problemas de ciencias que involucran integrales definidas. Luego, define formalmente la integral definida y describe métodos para calcularlas exactamente mediante el uso de primitivas. Finalmente, discute métodos para aproximar numéricamente el valor de integrales definidas.




















![Integrales area electricidad, electronica y telecomunicaciones [muy bueno]](https://cdn.slidesharecdn.com/ss_thumbnails/integrales-areaelectricidadelectronicaytelecomunicacionesmuybueno-120831173227-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






![Ti nspire handheld_getting_started_es[1]](https://cdn.slidesharecdn.com/ss_thumbnails/tinspirehandheldgettingstartedes1-150125060143-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)


























































