Descargar como PDF, PPTX

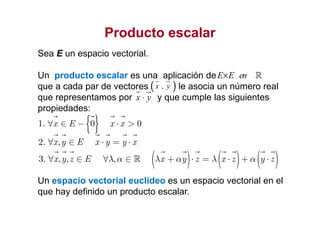
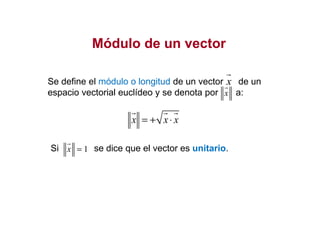
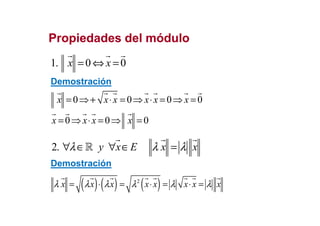
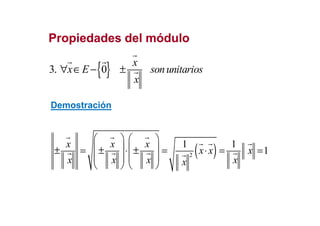
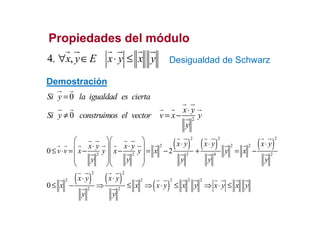
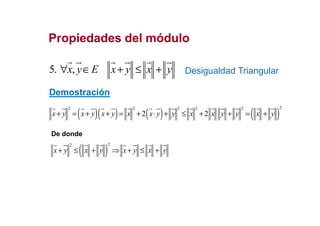
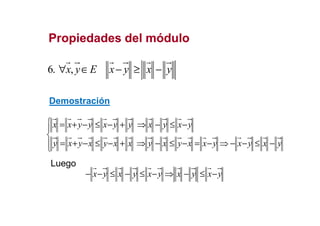
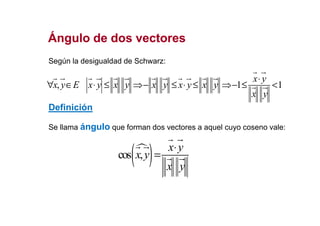

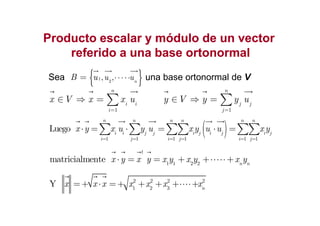
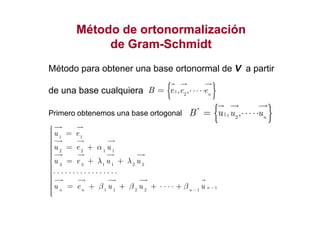
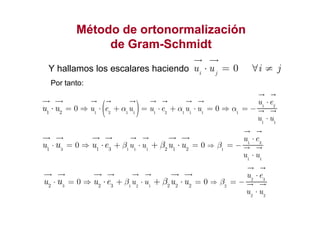
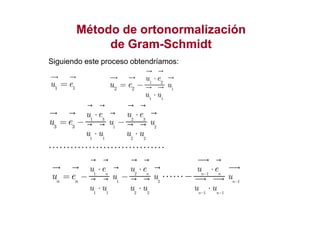
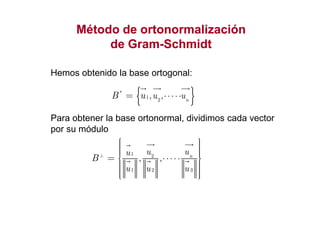
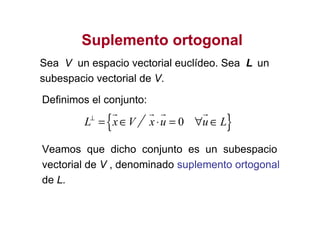
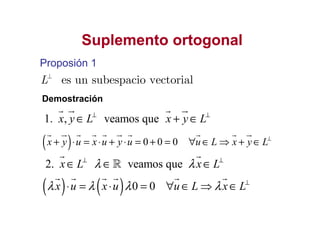
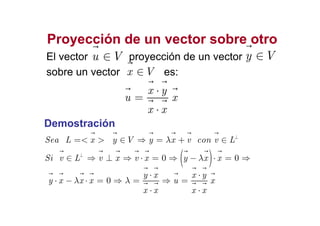

Este documento describe los conceptos fundamentales de los espacios vectoriales euclídeos, incluyendo el producto escalar, módulo de un vector, propiedades del módulo, ángulo entre vectores, ortogonalidad, subespacios ortogonales y bases ortonormales. También presenta el método de Gram-Schmidt para obtener una base ortonormal a partir de una base cualquiera.































































































