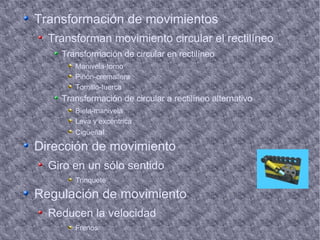
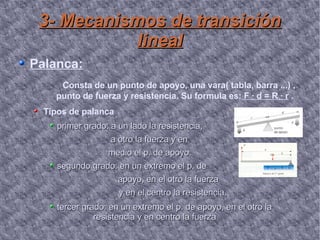
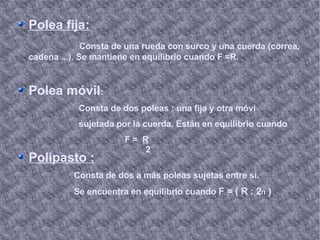
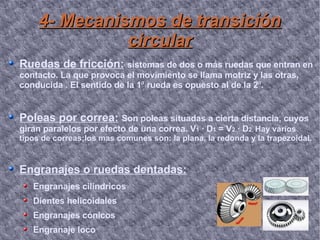
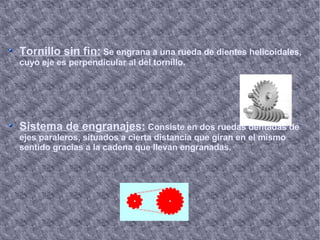
Este documento clasifica y describe varios tipos de mecanismos. Explica los mecanismos de transmisión lineal como la palanca y la polea, y los mecanismos de transmisión circular como las ruedas de fricción, poleas con correa y engranajes. También describe mecanismos para la transformación de movimiento circular a rectilíneo como el piñón-cremallera, tornillo-tuerca y manivela-torno, así como mecanismos para la transformación de movimiento circular a rectilíneo alternativo como la biela-maniv




































![Tribus Aa 1 [1].Pp.](https://cdn.slidesharecdn.com/ss_thumbnails/tribusaa11pp-1232433290689034-3-thumbnail.jpg?width=640&height=640&fit=bounds)




































