Descargar para leer sin conexión
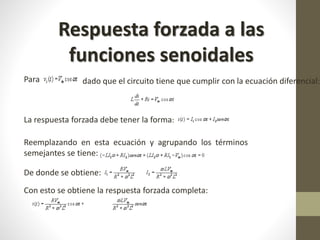
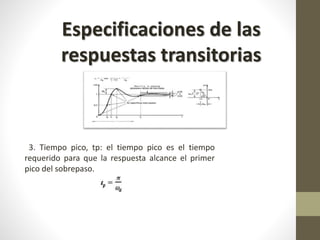
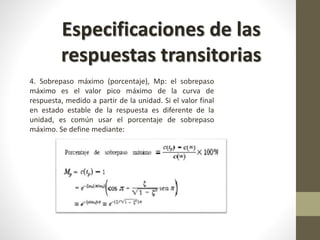
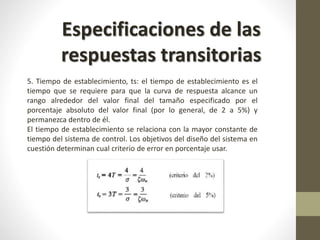
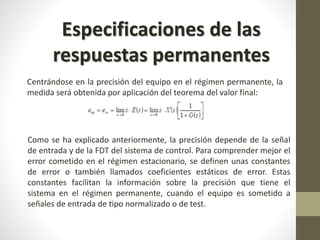
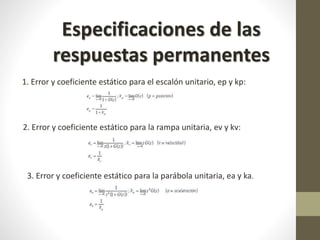

El documento describe conceptos relacionados con circuitos RC y respuestas de sistemas de control a diferentes tipos de señales de entrada. Explica el comportamiento de un circuito RC simple en serie y cómo calcular su voltaje a través del tiempo. Luego, cubre conceptos como la respuesta forzada a funciones senoidales, las especificaciones comunes para describir respuestas transitorias como tiempo de retardo, sobrepaso máximo y tiempo de establecimiento, y cómo definir errores y coeficientes estáticos para describir la precisión en el régimen permanente.















































































