
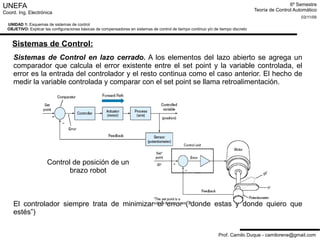

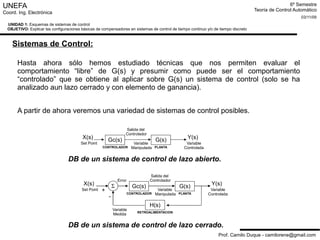
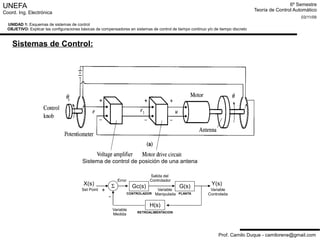


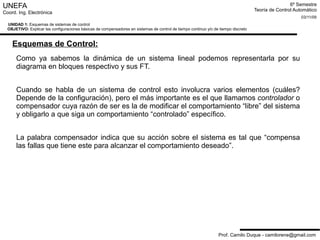
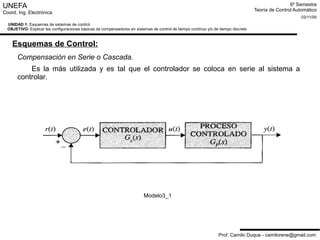
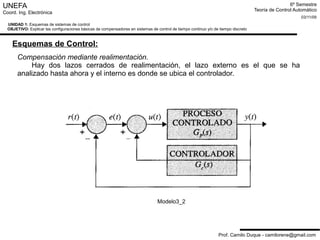




Este documento presenta los conceptos básicos de los sistemas de control. Explica que un sistema de control consta de un controlador, un actuador y una planta. Discuten los sistemas de control de lazo abierto y de lazo cerrado, y cómo la retroalimentación mejora el desempeño del sistema. También describe los componentes clave de un sistema de control como la variable controlada, la variable manipulada y la perturbación. Finalmente, introduce los diferentes esquemas de control como la compensación en serie y la compensación mediante realimentación.





















































































