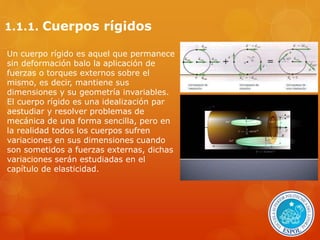
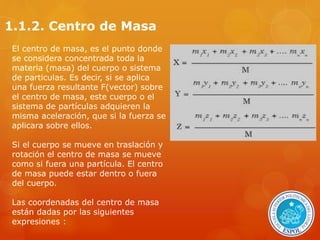
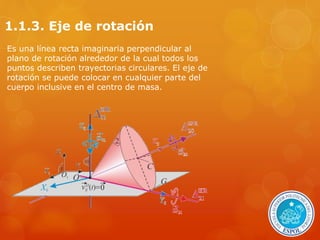
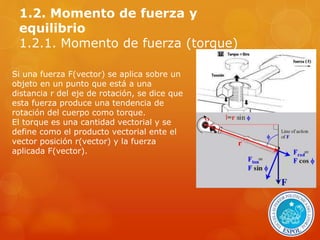
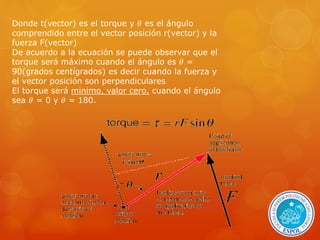
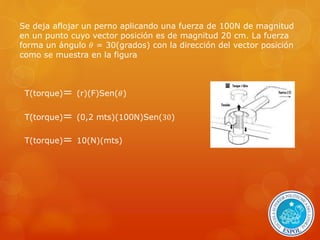
Este documento presenta una introducción al movimiento de cuerpos rígidos, incluyendo definiciones clave como cuerpos rígidos, centro de masa y eje de rotación. Explica que el centro de masa se mueve como una partícula en traslación, mientras que el cuerpo rota alrededor de su eje. También define el momento de fuerza (torque) como el producto vectorial entre la fuerza aplicada y la distancia al eje, y que es máximo cuando la fuerza es perpendicular a la línea de acción.