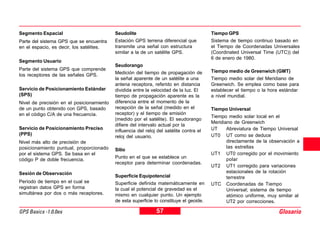
El documento describe los tres segmentos principales del sistema GPS: el segmento espacial compuesto por satélites en órbita, el segmento de control formado por estaciones terrestres, y el segmento de usuarios. Explica que el GPS determina la posición empleando mediciones de distancia a múltiples satélites y describiendo tres métodos principales: navegación autónoma con un solo receptor, posicionamiento diferencial de fase para precisión milimétrica, y posicionamiento diferencial corregido (DGPS) para precisión de 0.5 a 5 metros.























































































![Sistemas De Lev[1]. Inerciales Y Por Satelite](https://cdn.slidesharecdn.com/ss_thumbnails/sistemasdelev1-inercialesyporsatelite-090715153806-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)















![Sistemas De Lev[1]. Inerciales Y Por Satelite](https://cdn.slidesharecdn.com/ss_thumbnails/sistemasdelev1-inercialesyporsatelite-090715155241-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)








































![Ceni space [octubre]](https://cdn.slidesharecdn.com/ss_thumbnails/cenispaceoctubre-111014121901-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)


