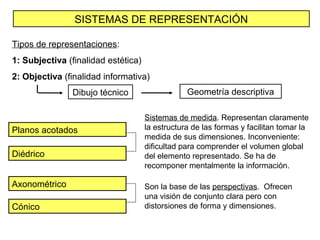
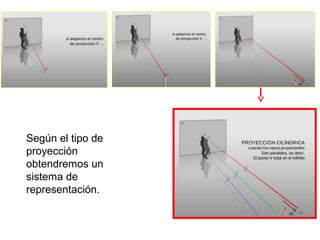
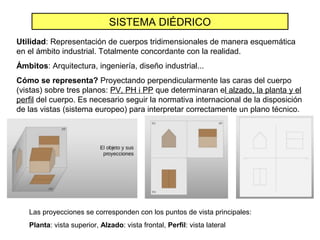
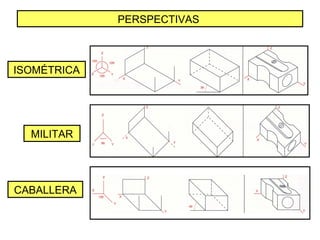
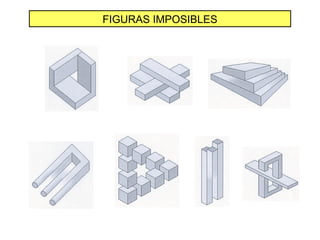
Este documento presenta diferentes sistemas de representación utilizados en dibujo técnico para representar objetos tridimensionales en un plano bidimensional de manera objetiva e informativa. Describe brevemente los sistemas diédrico, axonométrico, cónico y acotado, indicando cómo se realizan las proyecciones correspondientes a cada uno. También menciona las perspectivas isométrica, militar y caballera, así como las figuras imposibles que contradicen las reglas de la geometría.