1) El documento describe el modelado y estudio de ecuaciones diferenciales lineales de primer orden utilizando la transformada de Laplace en MATLAB-SIMULINK. 2) Explica cómo modelar sistemas físicos como temperatura en un horno o llenado de un tanque mediante ecuaciones diferenciales. 3) Detalla el análisis de ecuaciones diferenciales lineales de primer orden a través de la obtención de las funciones de transferencia G(s) y respuesta Y(s).










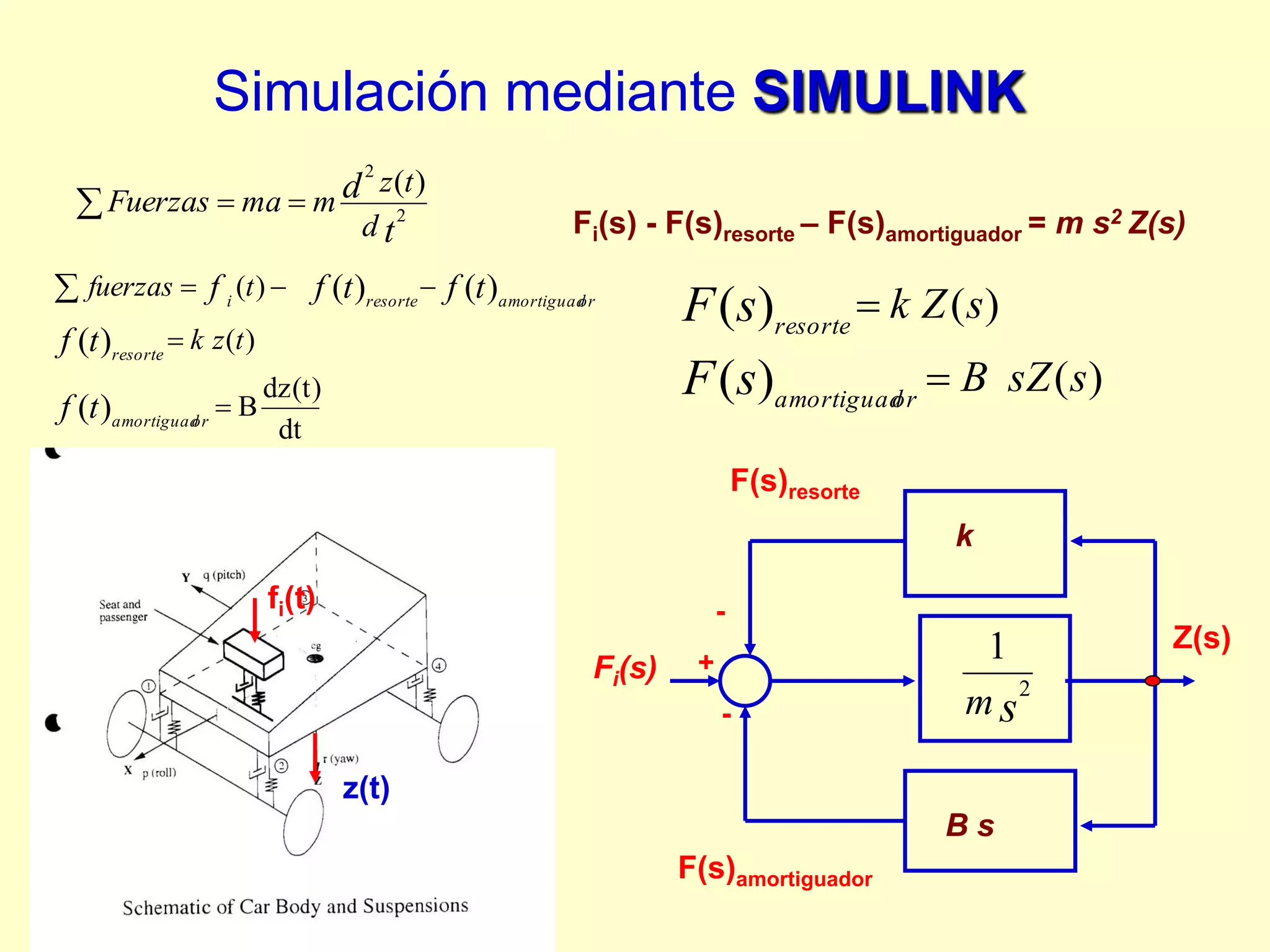
![G(s) y Y(s)
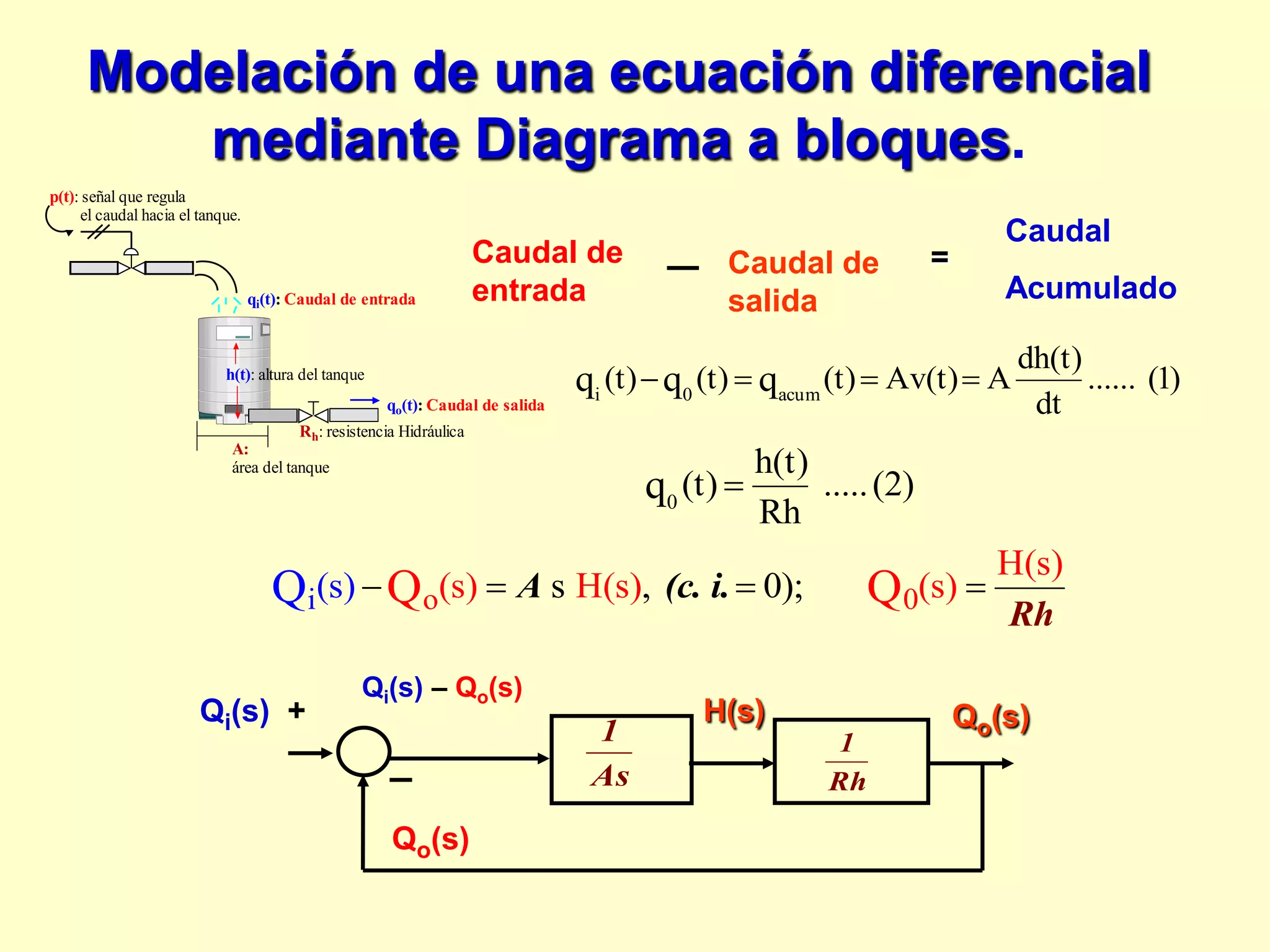
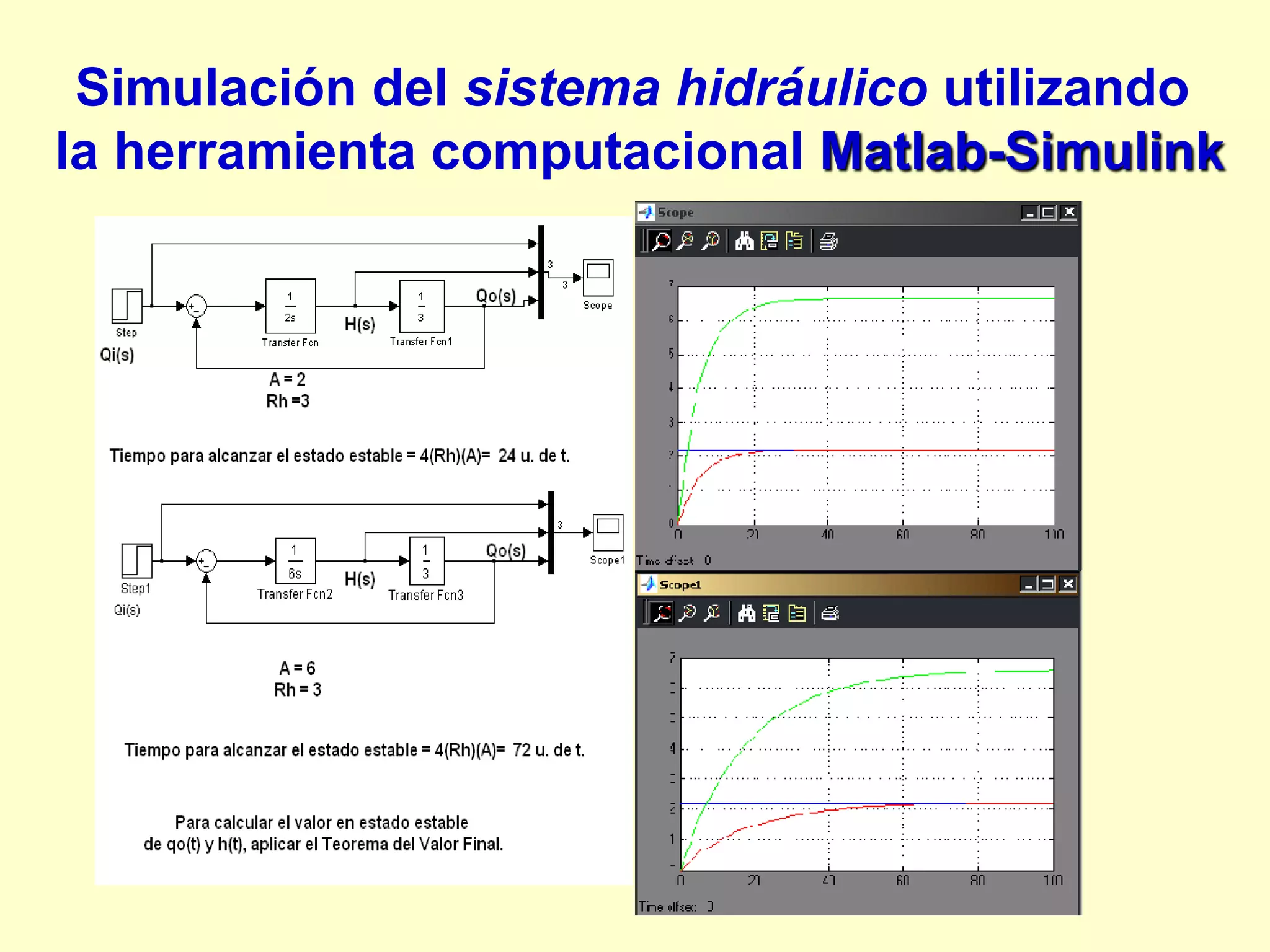
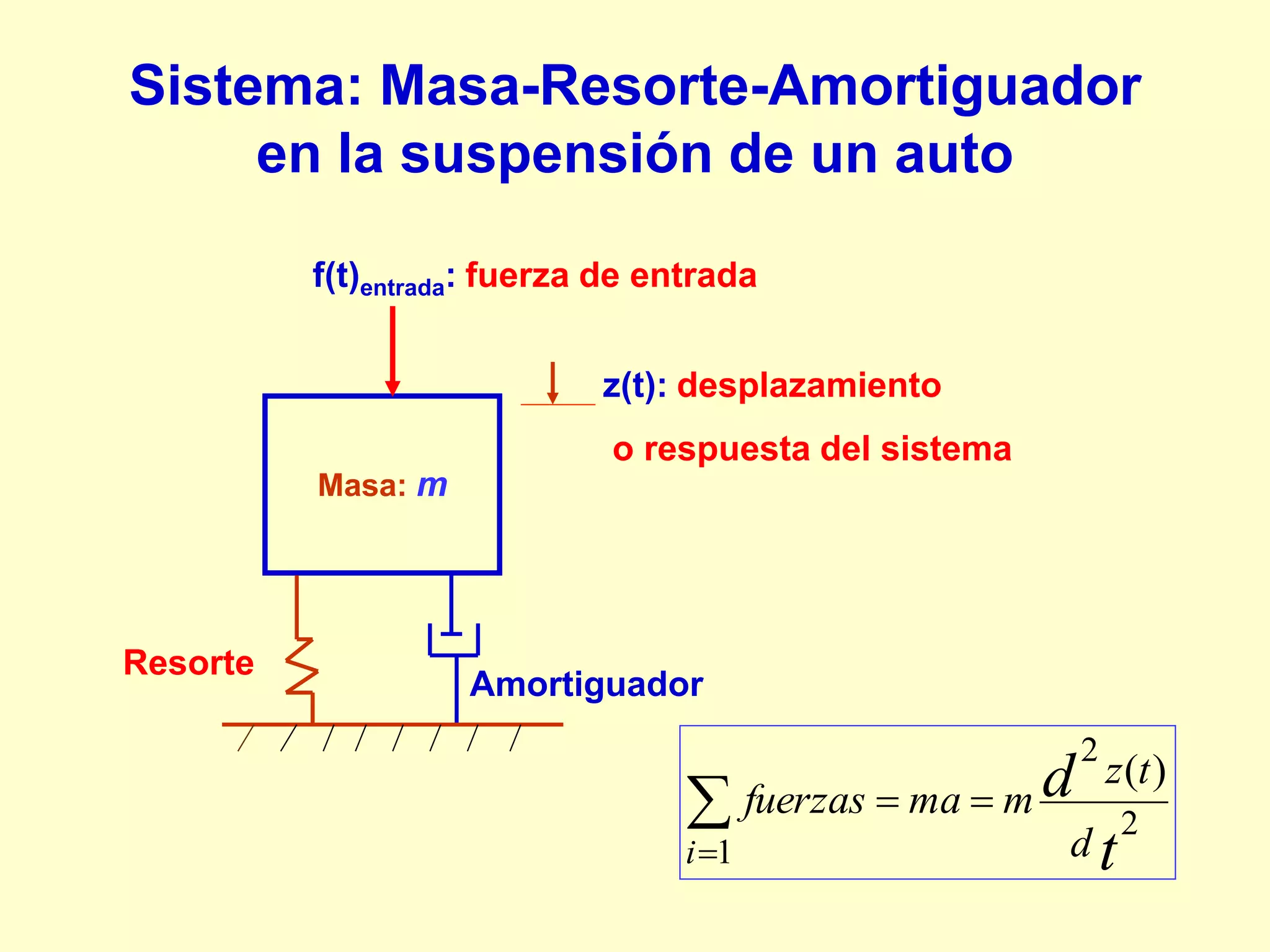
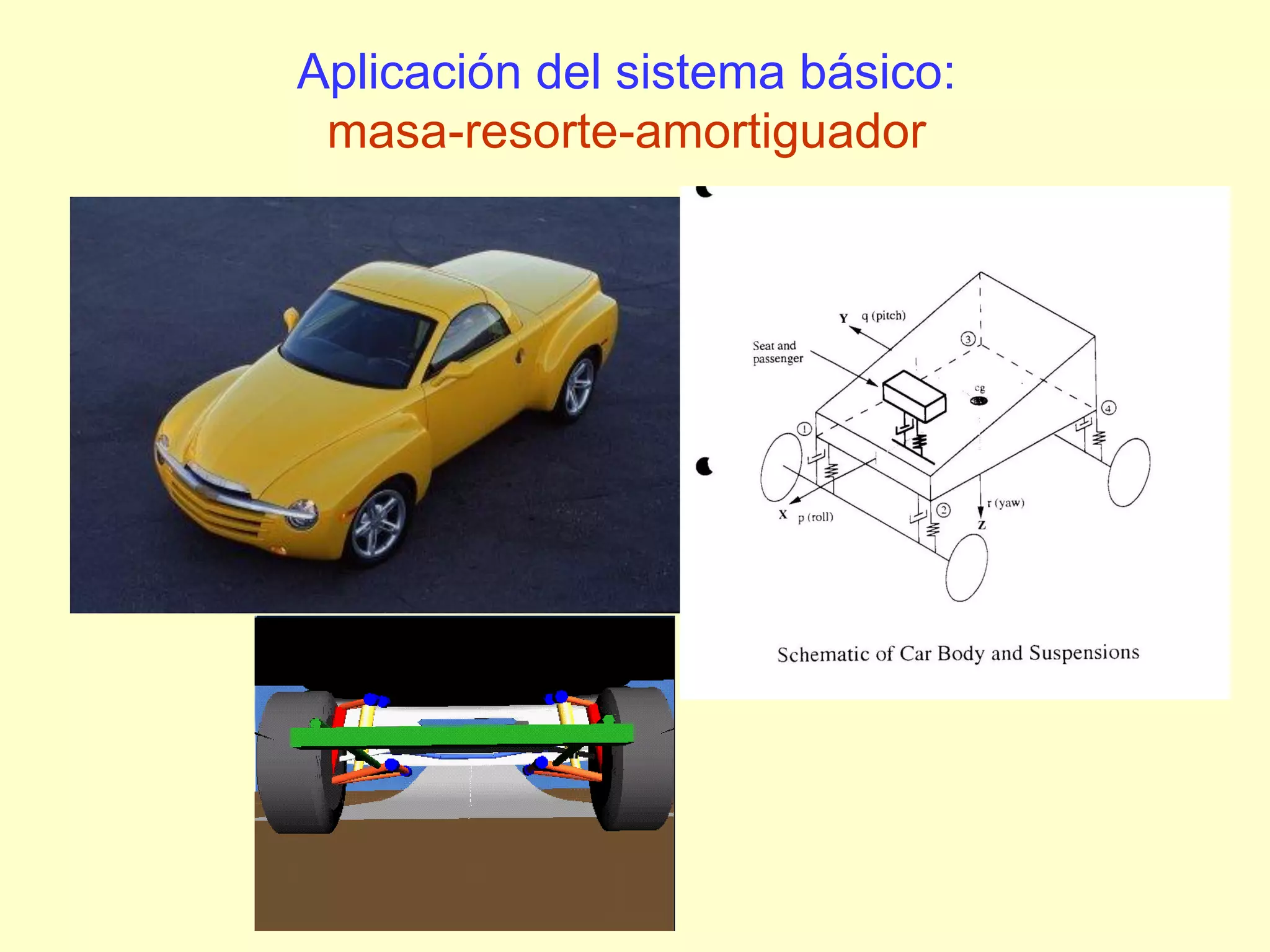
0
.,
.
2
)
(
;
.
.
8
.
0
)
0
(
);
(
2
.
1
)
(
)
(
10
t
para
i
de
u
t
u
i
de
u
y
t
u
t
y
dt
t
dy
cia
Transferen
de
Función
s
s
s
G
s
U
s
Y
s
U
y
s
s
Y
s
U
s
Y
y
s
sY
t
u
t
y
dt
t
dy
i
c
:
1
.
0
12
.
0
1
10
2
.
1
)
(
)
(
)
(
);
(
)
0
(
10
]
1
10
)[
(
);
(
)
(
)
0
(
10
)
(
10
)}
(
{
)}
(
)
(
10
{
| 0
.
.
L
L
jw
X
-0.1
Para la ecuación diferencial
Solución:
Respuesta
Función
:
)
1
.
0
(
)
3
.
0
(
8
.
0
)
1
10
(
4
.
2
8
)
(
4
.
2
8
8
2
2
.
1
]
1
10
)[
(
;
2
2
.
1
)
8
.
0
(
10
]
1
10
)[
(
);
(
2
.
1
)
(
)
0
(
10
)
(
10
)}
(
2
.
1
{
)}
(
)
(
10
{
s
s
s
s
s
s
s
Y
s
s
s
s
s
Y
s
s
s
Y
s
U
s
Y
y
s
sY
t
u
t
y
dt
t
dy
L
L
jw
o X X
-0.3 -0.1 0
Obtener: a) G(s) y, b) Y(s)](https://image.slidesharecdn.com/laplacematlab-211127024645/75/Laplace-matlab-13-2048.jpg)
![Gráfica aproximada de y(t) a partir de Y(s)
1
200
1600
)
(
1600
]
1
200
)[
(
;
0
)
(
)
0
(
200
)
(
200
80
)
0
(
;
0
)
(
)
(
200
s
s
Y
s
s
Y
s
Y
y
s
sY
C
y
t
y
dt
t
dy
80
200
1600
1
200
1600
)
(
)
0
( lim
lim
s
s
s
sY
y
s
s
0
1
200
1600
)
(
)
( lim
lim
0
0
s
s
s
sY
y
s
s
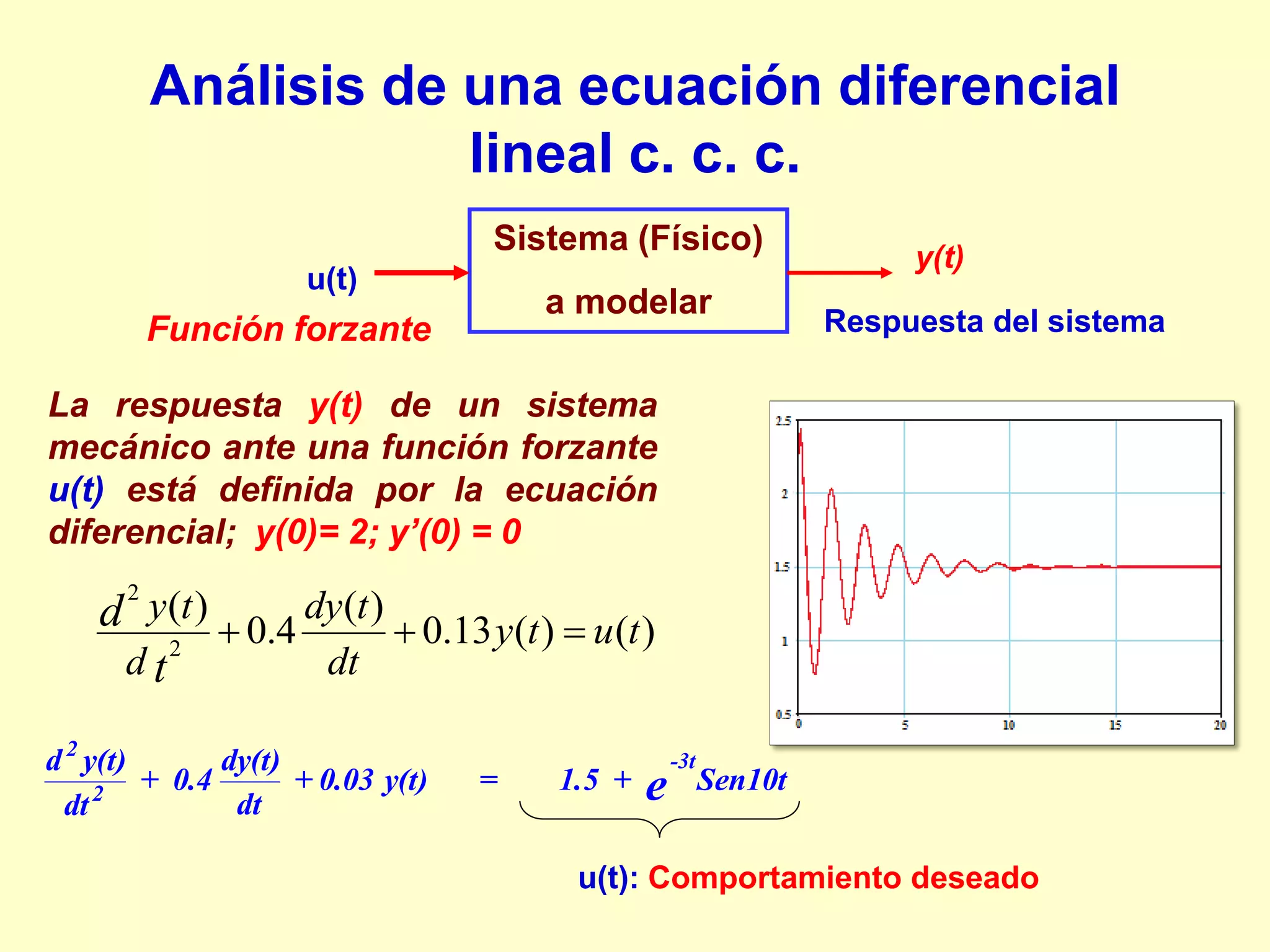
Un horno que se encuentra a 80°C se apaga para su enfriamiento.
Considere que la relación Temperatura-flujo combustible, es representada
por la ecuación Diferencial: 200y´(t) + y(t) = K u(t). Obtenga, y(0) y y()
Teorema de valor inicial:
Teorema del valor final:
t
80 ºC
0 ºC](https://image.slidesharecdn.com/laplacematlab-211127024645/75/Laplace-matlab-15-2048.jpg)